 |
||||||
| HOME |
||||||

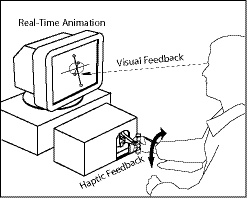
| Haptic feedback may provide an
information pathway for the human motor system to monitor
the controlled states during a manual task.
<>However,
force interactions could also give rise to a more complex mechanical
system by coupling the arm to an outside environment. In the
current study, we investigate if force interactions with
an
external object could constitute sensory feedback used in continuous
manual
control. We also examine how haptic feedback can cause
disturbances to the desired movement in certain situations. We developed a manual interface operated by grasping a rotary handle and performing pronation and supination of the forearm. Using this apparatus, human operators attempted to manually excite oscillations of a virtual spring-inertia system. We compare human performance using isolated visual and haptic feedback versus combined feedback, in order to determine how humans integrate information from the two different sensory modes. We also examine how performance is affected by varying the level of haptic feedback during the manual task, as well as how performance changes with adaptation. |

 |
|
|
|
| Huang, Felix Gillespie, R. Brent |
|
 Related
Project(s) Related
Project(s) |
|
| |
|
| Adaptation to Task
Parameters in Object Manipulation Upper Extremity Stroke Rehabilitation |
|
 Research
Project Papers Research
Project Papers |
|
| Combined Feedback Improves Control of a Resonant Mechanical System | |
 |
Project Sponsors |
| Rehabilitation Institute of Chicago, R24 | |
 Research
Project Member(s)
Research
Project Member(s)