|
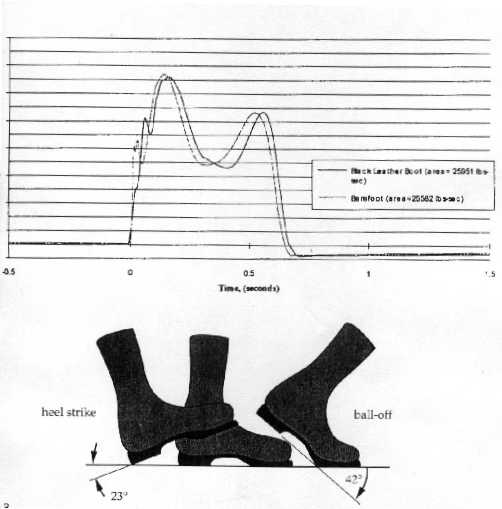
Figure 1. Geometry and forces of walking motion
|
||
|
|
||
|
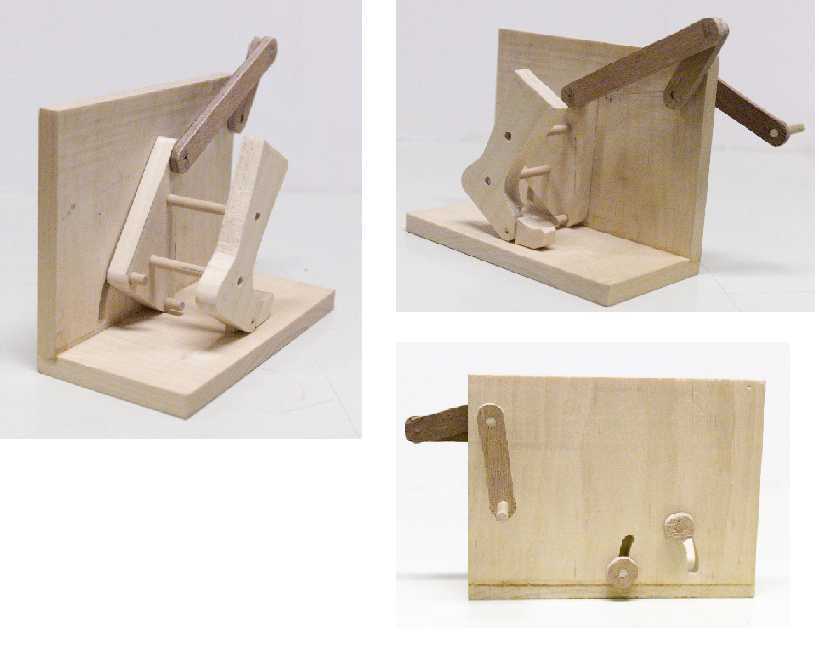
Figure 2. Prototype to demonstrate the simulation of walking motion (kinematic requirement) |
||
|
Previous: Mechanism Design for Paper Folding Machine
|