Inferring Categories to Accelerate the Learning of New Classes
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots
and Systems (IROS), 2013
Robert Goeddel and Edwin Olson
 Abstract -
On-the-fly learning systems are necessary for the deployment of general purpose
robots. New training examples for such systems are often supplied by mentor
interactions. Due to the cost of acquiring such examples, it is desirable to
reduce the number of necessary interactions. Transfer learning has been shown
to improve classification results for classes with small numbers of training
examples by pooling knowledge from related classes. Standard practice in these
works is to assume that the relationship between the transfer target and
related classes is already known.
Abstract -
On-the-fly learning systems are necessary for the deployment of general purpose
robots. New training examples for such systems are often supplied by mentor
interactions. Due to the cost of acquiring such examples, it is desirable to
reduce the number of necessary interactions. Transfer learning has been shown
to improve classification results for classes with small numbers of training
examples by pooling knowledge from related classes. Standard practice in these
works is to assume that the relationship between the transfer target and
related classes is already known.
In this work, we explore how previously learned categories, or related
groupings of classes, can be used to transfer knowledge to novel classes
without explicitly known relationships to them. We demonstrate an algorithm
for determining the category membership of a novel class, focusing on the
difficult case when few training examples are available. We show that
classifiers trained via this method outperform classifiers optimized to learn
the novel class individually when evaluated on both synthetic and real-world
datasets.
PDF
Exploration and Mapping with Autonomous Robot Teams
Communications of the ACM
Edwin Olson, Johannes Strom, Robert Goeddel, Ryan Morton,
Pradeep Ranganathan, and Andrew Richardson
Abstract -
The potential impact of autonomous robotics is magnified when those robots are
deployed in teams: a team of cooperating robots can greatly increase the
effectiveness of a human working alone, making short work of search-and-rescue
and reconnaissance tasks. To achieve this potential, however, a number of
challenging problems ranging from multi-robot planning, state estimation,
object detection, and human-robot interfaces must first be solved. The MAGIC
2010 competition, like the DARPA grand challenges that preceded it, presented a
formidable robotics problem designed to foster fundamental advances in these
difficult areas. MAGIC asked teams of robots to collaboratively explore and map
a 500 × 500m area, detect and track benign and dangerous objects, and
collaborate with human commanders while respecting their cognitive limits.
This paper describes our winning entry in the MAGIC contest, where we fielded a
team of 14 autonomous robots supervised by two human operators. While the
challenges in MAGIC were diverse, we believe that cooperative multi-robot
state estimation is ultimately the critical factor in building a successful
system. In this paper, we describe our system and some of the technological
advances that we believe were responsible for our success. We also contrast
our approach to those of other teams
PDF
DART: A particle-based Method for Generating Easy-to-Follow Directions
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots
and Systems (IROS), 2012
Robert Goeddel and Edwin Olson
 Abstract -
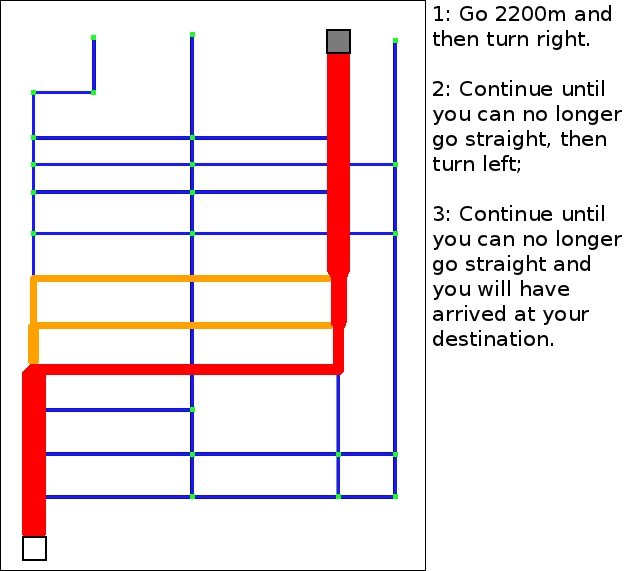
Despite evidence that human wayfinders consider directions involving landmarks
or topological descriptions easier to follow, the majority of commerical
direction-planning services and GPS navigation units plan routes based on
metrically or temporally shortest paths, ignoring this potentially valuable
information. We propose a methodo for generating directions that maximizes
the probability of a human arriving at the correct destination, taking into
account a model of their ability to follow topological, metrical, and
landmark-based directions. We discuss optimization techniques for employing
these models and present a method, DART, for extracting model-improved sets
of directions in a tractable amount of time. DART employs particle simulation
techniques to maximize the probability that the modeled wayfinder will
successfully reach their destination. Our synthetic evaluation shows that DART
produces improvements in arrival rates over existing methods and illustrates
how DART’s directions reflect properties of the wayfinder model.
Abstract -
Despite evidence that human wayfinders consider directions involving landmarks
or topological descriptions easier to follow, the majority of commerical
direction-planning services and GPS navigation units plan routes based on
metrically or temporally shortest paths, ignoring this potentially valuable
information. We propose a methodo for generating directions that maximizes
the probability of a human arriving at the correct destination, taking into
account a model of their ability to follow topological, metrical, and
landmark-based directions. We discuss optimization techniques for employing
these models and present a method, DART, for extracting model-improved sets
of directions in a tractable amount of time. DART employs particle simulation
techniques to maximize the probability that the modeled wayfinder will
successfully reach their destination. Our synthetic evaluation shows that DART
produces improvements in arrival rates over existing methods and illustrates
how DART’s directions reflect properties of the wayfinder model.
PDF
Progress towards multi-robot reconnaissance and the MAGIC 2010 Competition
Journal of Field Robotic, 2012
Edwin Olson, Johannes Strom, Ryan Morton, Andrew Richardson,
Pradeep Ranganathan, Robert Goeddel, Mihai Bulic, Jacob Crossman, and
Bob Marinier
 Abstract -
Tasks like search-and-rescue and urban reconnaissance benefit from large numbers
of robots working together, but high levels of autonomy are needed in order to
reduce operator requirements to practical levels. Reducing the reliance of such
systems on human operators presents a number of technical challenges including
automatic task allocation, global state and map estimation, robot perception,
path planning, communications, and human-robot interfaces. This paper describes
our 14-robot team, designed to perform urban reconnaissance missions, that won
the MAGIC 2010 competition. This paper describes a variety of autonomous systems
which require minimal human effort to control a large number of autonomously
exploring robots. Maintaining a consistent global map, essential for autonomous
planning and for giving humans situational awareness, required the development
of fast loop-closing, map optimization, and communications algorithms. Key to
our approach was a decoupled centralized planning architecture that allowed
individual robots to execute tasks myopically, but whose behavior was
coordinated centrally. In this paper, we will describe technical contributions
throughout our system that played a significant role in the performance of our
system. We will also present results from our system both from the competition
and from subsequent quantitative evaluations, pointing out areas in which the
system performed well and where interesting research problems remain.
Abstract -
Tasks like search-and-rescue and urban reconnaissance benefit from large numbers
of robots working together, but high levels of autonomy are needed in order to
reduce operator requirements to practical levels. Reducing the reliance of such
systems on human operators presents a number of technical challenges including
automatic task allocation, global state and map estimation, robot perception,
path planning, communications, and human-robot interfaces. This paper describes
our 14-robot team, designed to perform urban reconnaissance missions, that won
the MAGIC 2010 competition. This paper describes a variety of autonomous systems
which require minimal human effort to control a large number of autonomously
exploring robots. Maintaining a consistent global map, essential for autonomous
planning and for giving humans situational awareness, required the development
of fast loop-closing, map optimization, and communications algorithms. Key to
our approach was a decoupled centralized planning architecture that allowed
individual robots to execute tasks myopically, but whose behavior was
coordinated centrally. In this paper, we will describe technical contributions
throughout our system that played a significant role in the performance of our
system. We will also present results from our system both from the competition
and from subsequent quantitative evaluations, pointing out areas in which the
system performed well and where interesting research problems remain.
PDF
Coordinating a Team of Robots for Urban Reconnaissance
Proceedings of the Land Warfare Conference (LWC), 2010
Pradeep Ranganathan, Ryan Morton, Andrew Richardson, Johannes Strom,
Robert Goeddel, Mihai Bulic, and Edwin Olson
Abstract -
Gathering intelligence about a potentially hostile environment is a critical
capability for war fighters. Using a team of robots for this task is an
attractive option because it allows data to be gathered quickly while
simultaneously removing humans from danger. However, fielding a team of robots
requires three key problems to be solved: first, the human commander must be
able to efficiently interact with the robots and issue orders that they can
understand; second, the system must be able to decompose orders into tasks for
individual robots; and third, the robots must have the perceptual capabilities
needed to operate for extended periods of time without operator assistance. In
this paper, we present our solutions to these problems, and demonstrate our
approaches using our test-bed which allows a single operator to control fifteen
robots.
PDF
