OpenCAV

I serve as the team leader of the University of Michigan open connected and automated research vehicles, or OpenCAVs, which will be open testbeds for academic and industry researchers to rapidly test self-driving and connected vehicle technologies at Mcity, a world-class proving ground.
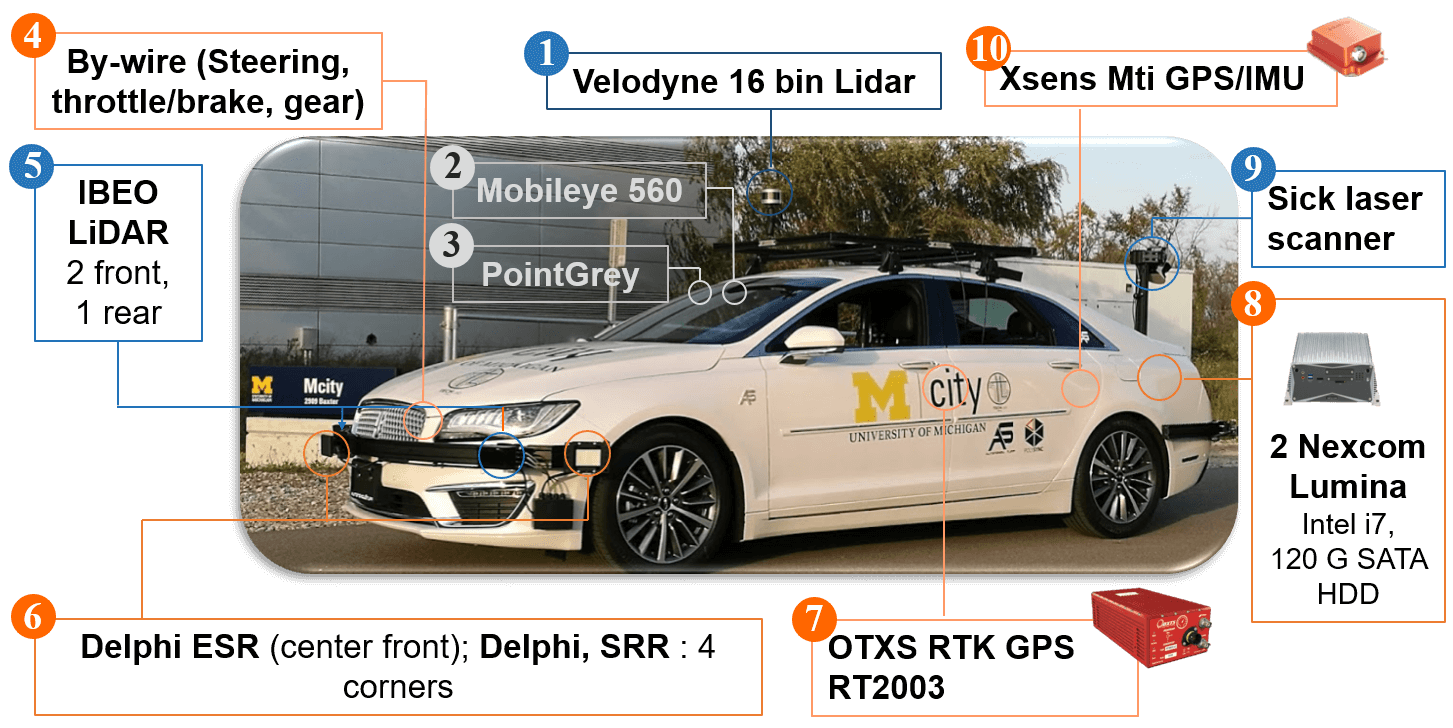
The OpenCAV Platform
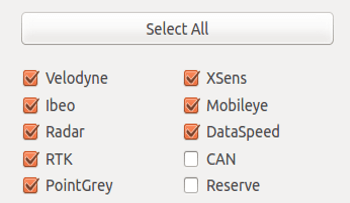
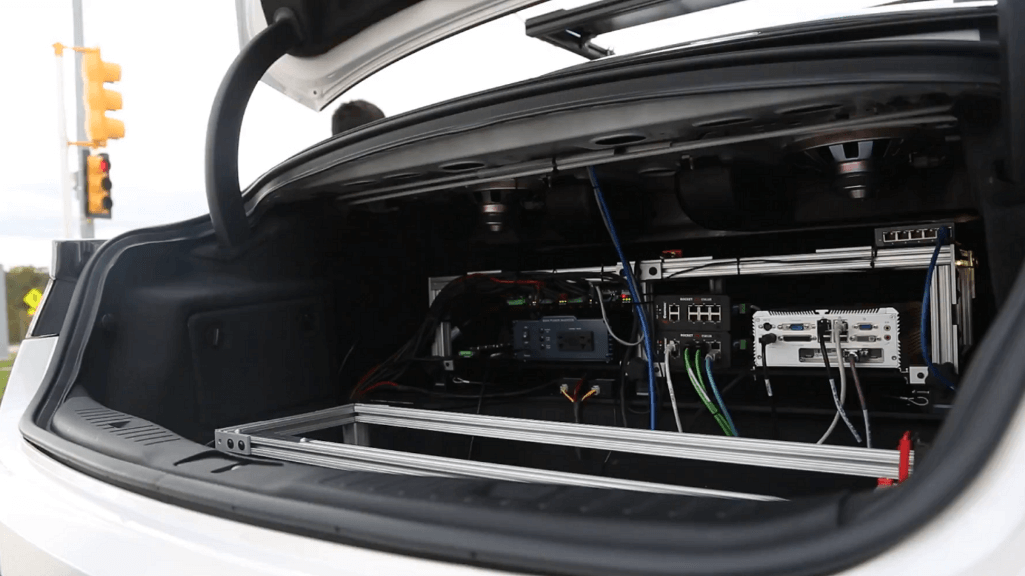
The OpenCAVs, are equipped with a variety of sensors including radar, lidar, cameras, and V2X communicators, among other features. They will be able to link to a robot operating system.
Developed Apps
We have been developing OpenCAVs using an "appified" fashion, that is, each function is developed as a "node" and communicates in a network. We plan to release our work as open source soon (approximately in the middle 2017).
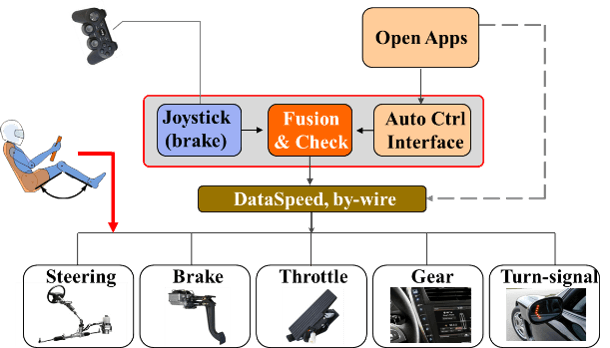
By-wire control (with Guardian layer)
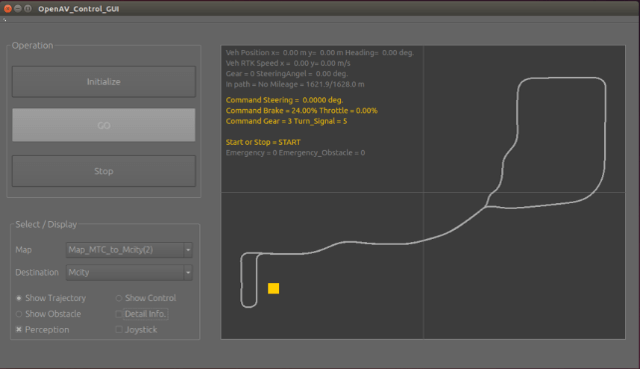
Humann machine interface

Remote control
Trajectory tracking
Collision avoidance
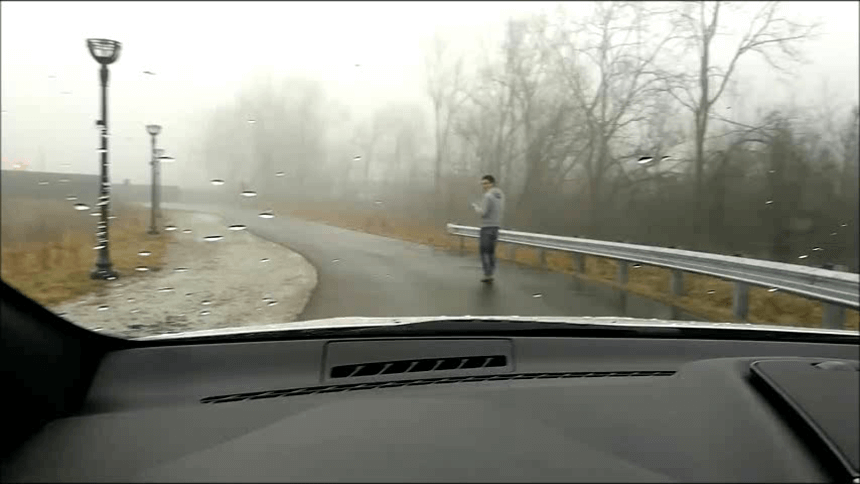
Self-driving in Mcity
We have conducted hundreds of tests in Mcity in a variety of driving contexts, including downtown/highway, daytime/night, wind, rain, and snow.