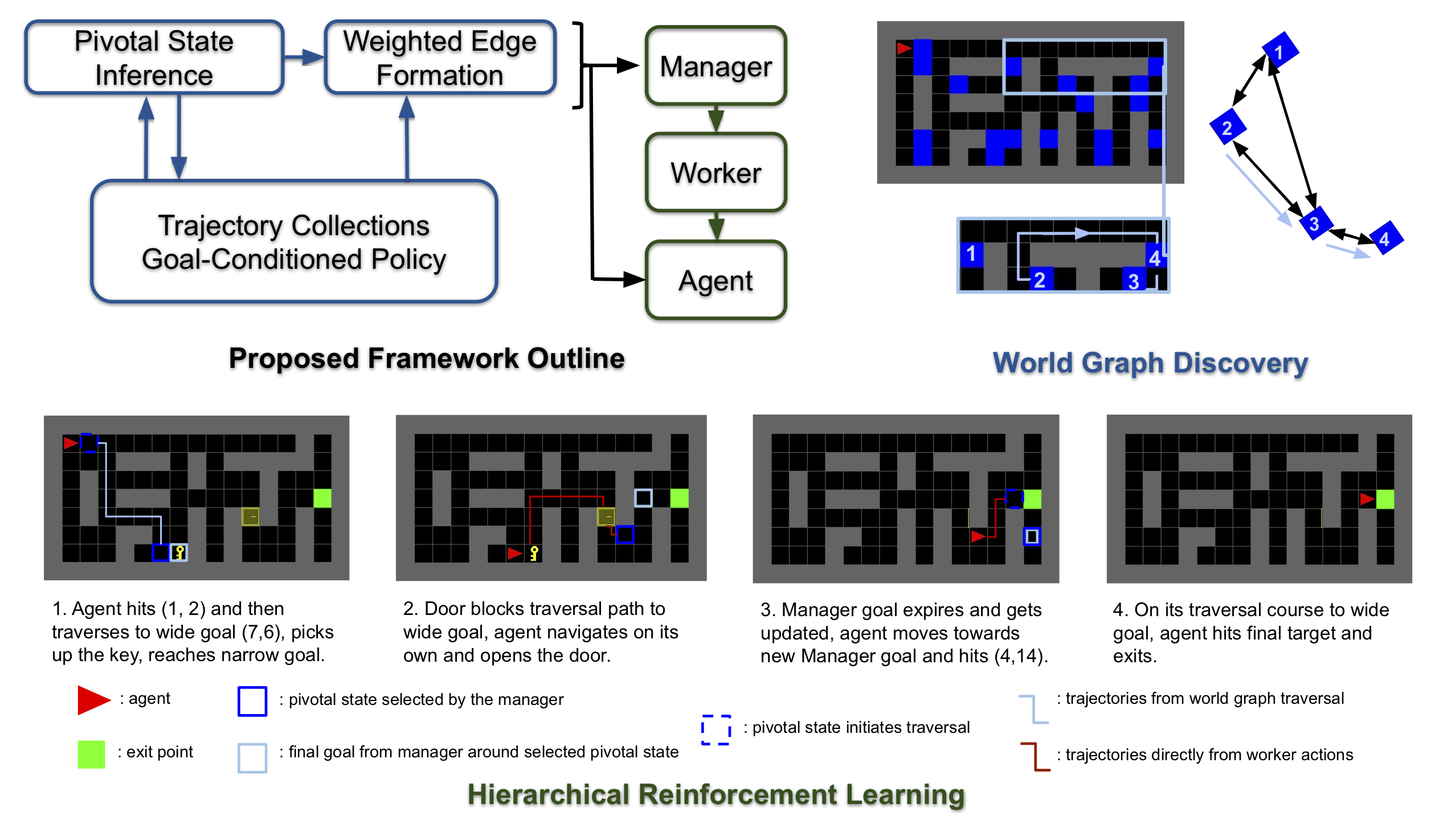
An autonomous agent often counters various tasks within a single complex environment. Our two-stage framework proposes to first build a simple directed weighted graph abstraction over the world in an unsupervised task-agnostic manner and then to accelerate the hierarchical reinforcement learning of a diversity of downstream tasks. Details please refer to Paper with Appendix.
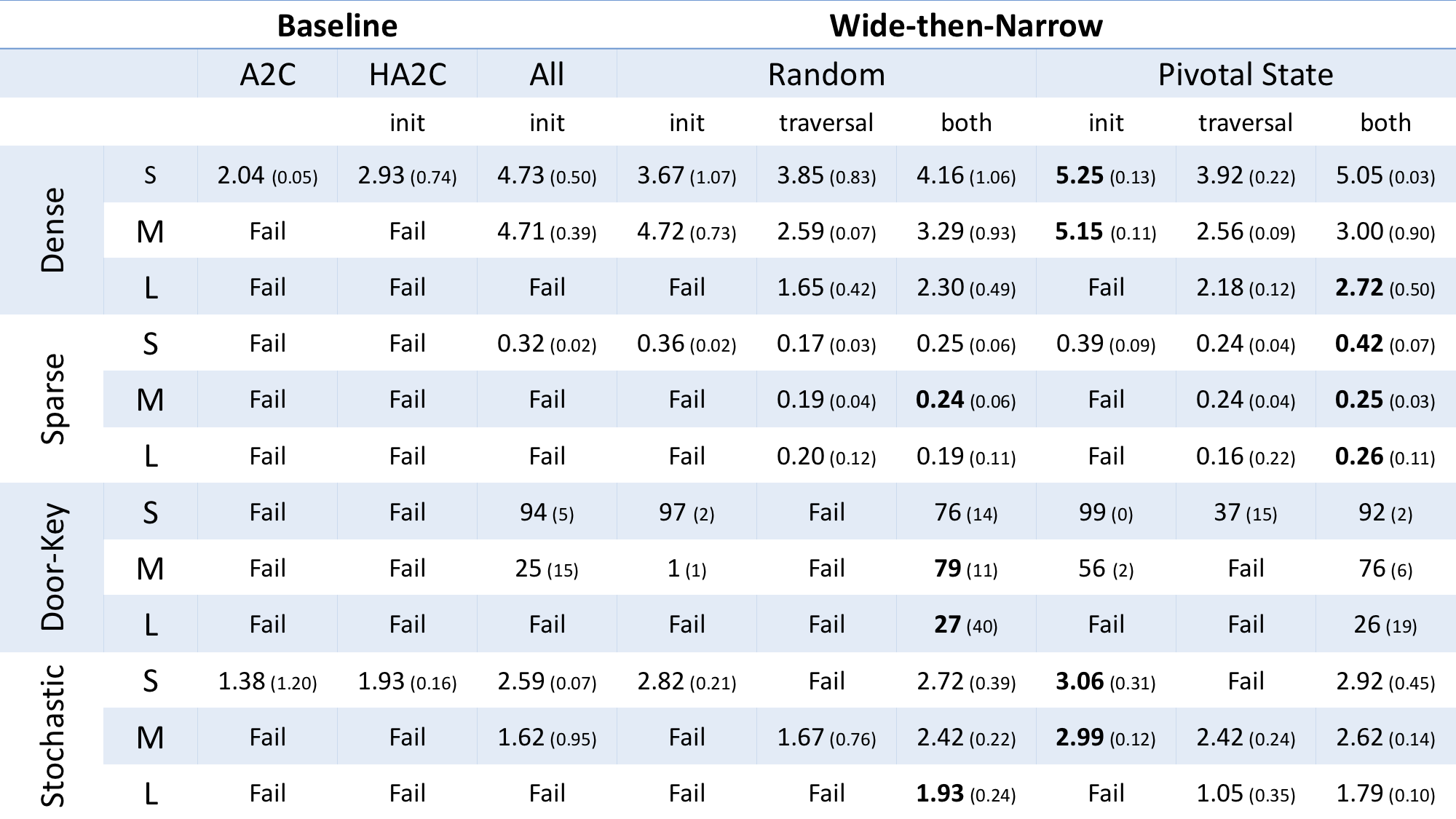
A2C |
FN |
All Feasible States |
Random States |
Pivotal States |
Random States |
Pivotal States |
Random States |
Pivotal States |
A2C |
FN |
Proposed |
All Feasible States |
Pivotal States |
Random States |
with Goal-Conditioned Policy Initialization |
without Goal-Conditioned Policy Initialization |
with Goal-Conditioned Policy Initialization |
without Goal-Conditioned Policy Initialization |