Basic Components and Diversity
Locomotion is a loose term for motion through the water. It encompasses numerous adaptations that are important to choices among diverse habitats, and hence the distribution and survival of fish in space and time.
A propulsion system is comprised of:
Because the density of the body is close to that of water, fish do not have to support much, or any weight. As a result, all the fins and the body can be used for locomotion. This results in a wide diversity of propulsors.
The costs of locomotion increase rapidly with speed (resistance with u2 and power with u3). No single muscle or propulsor can function efficiently over a large force/power range, and hence over a large speed range. Therefore, a large number of propulsion systems are used to minimize swimming costs.
Many classifications have been proposed to organize the diversity of propulsors into groups reflecting basic principles. Major classifications are based on:
The most commonly used uses a combination of propulsor morphology and kinematics, with nomenclature using an exemplary group + the suffix "form", for example anguilliform.
Swimming modes are named for an exemplary family + suffix form.
Propulsion mechanisms - forces generation
Thrust
All propulsion involves momentum transfers. Thrust is any force which propels the body in a desired direction, or powers hovering. Resistance is any force which inhibits motion in a desired direction.
Mechanisms for thrust production
Lift or resistance based. The optimal shape for a lift-based propulsor to maximize thrust includes a high AR - a long, tapering, narrow-based fin - on a more horizontal fin base. The optimal shape for a resistance-based propulsor is triangular, small AR, with a large distal area, rotating in the plane of body motion around a narrow base. Optimal designs are mutually exclusive.
These primarily develop acceleration reaction forces, and a major variable is the length of the propulsive wave relative to the length of the propulsor base. Optimal design to maximize thrust with high efficiency involves a long wavelength, narrow caudal peduncle, high AR tail, and large muscle mass.
Fast-starts harness acceleration reaction. Optimal design to maximize thrust for fast-starts involves large caudal area, a flexible body, which are exclusive of those maximizing sprints, and large muscle mass,.
Major sources of energy loss are drag and induced (vortical) energy, and in fast-starts, overcoming body inertia.
The locomotor performance range is fractionated in part by a variety of propulsors used in different ways.
|
VAR |
MPF |
BCF |
||||
|
STHLD |
H&S |
T&C |
CRS |
B&C |
SPRNT |
FST |
There are three primary muscle fiber types: SO ("red"), FOG, FG ("white"). Each fin has a separate set of motor muscles. Among the actinopterygians, there is a trend towards increasing complexity of muscles for control and orientation of the fin blade. Myotomal muscle also becomes more complex, with various muscle (force) trajectories arising as a result of folding of the myotomes, and focal, multiterminal, multineuronal innervation patterns.
Muscles are recruited in order of SO - FOG - FG. Muscle patterns and amounts correlate with mode of life:
Individual fish need (intra-specific) solutions to locomotor needs spanning a range of performance levels. All animals solve these locomotor performance range problem with locomotor range fractionation. The performance range is partitioned (fractionated) by gaits.
Gaits are defined as a pattern of locomotion characteristic of a limited range of speeds, and described by quantities one or more of which change discontinuously with increasing speeds. These changes are gait transitions.
Develop as box:
|
VAR |
MPF |
BCF |
||||||
|
MPF SO |
MPFFG |
|||||||
|
BCF SO |
BCF FG |
|||||||
|
STHLD |
H&S |
T&C |
CRS |
B&C |
SPRNT |
FST |
||
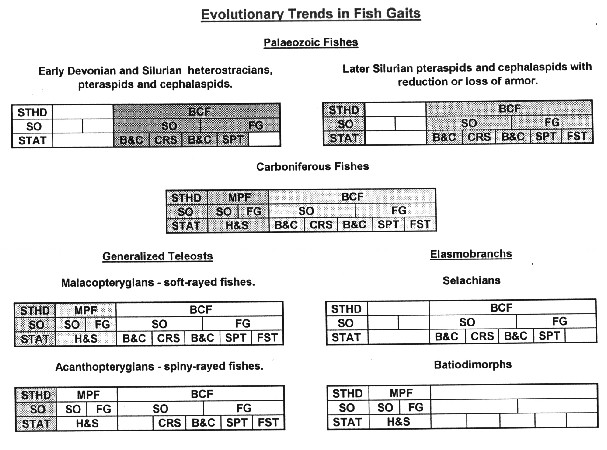
Variations in gaits among species
Gait expression depends of the presence of the necessary propulsors, muscle, and behaviors. Various morphologies exclude one or more gaits, by mutual exclusion and/or by loss of necessary morphological and anatomical features.
The number of gaits has increased through time with the evolution of various systems. Each radiation tends to overlap that of previous radiations, but with an increased range due to specialization made possible by new features.
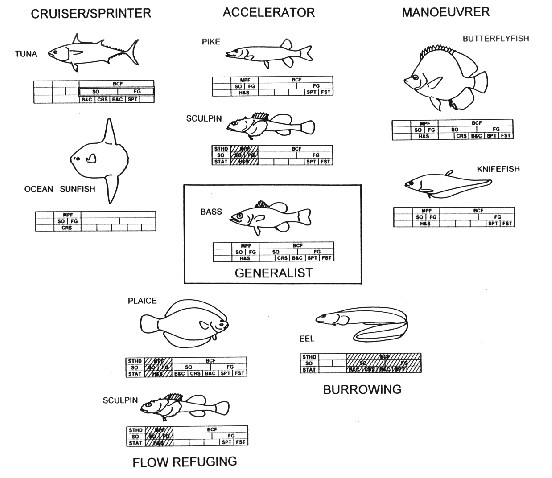
Specialization for a given gait is made at cost to other gaits - mutual exclusion principle. Increased range of performance levels in a gait to competition in a habitats is associated with specialist locomotor modes.
Gait expression varied during ontogeny as various components of propulsor systems differentiate and mature.
Large size is achieved at cost to acceleration performance, and typically reduction or loss of slow swimming gaits.
Temperature reduces performance (Q10 effect). Gait compression occurs with gaits operating over a smaller range of absolute speeds/accelerations.