Control of Hazardous Releases in Infrastructure Systems (NSF)
The objective of this project is to develop and apply a novel
technology for the automatic detection and real-time mitigation of accidental or
deliberate hazardous releases in infrastructure systems.
The automatic sensing and containment of a chemical release in these
facilities are vital because of the catastrophic potential to human life.
The proposed technology can be used to protect a passenger terminal,
transportation tunnel, aircraft fuselage, tall building or conduit carrying water to a municipality
in a reliable, cost-effective and socially acceptable way.
A prototype is being built at laboratory scale to demonstrate the detectability
and controllability of hazardous releases in real time.
Microsensor arrays capable of detecting a broad menu of chemical agents
will be installed at strategic locations in the prototype.
The sensors detect the instantaneous, spatially distributed
concentration of the chemical agent and transmit the associated information to a
predictive control model run by real-time hardware.
The model provides optimal operation scenarios for computer
controlled bleed valves mounted on the channel walls and connected to a common
manifold. Mitigation
and final elimination of the chemical cloud is achieved by optimal blowing
and suction of ambient fluid or injection of counteracting chemicals.
 The predictive control model is based on the dynamics of ambient fluid flow
and fate and transport of the hazardous release.
Gradient information is obtained by use of adjoint equations, so
optimization of the control actions is achieved with the highest possible
efficiency. The control is
optimized over a finite prediction horizon and instructions are sent to the
valve manifold. Next, the sensor
arrays detect all changes effected by the control and report them to the
control model, which advances the process over the next finite horizon.
Sensing, optimization and feedback are achieved in a time period
shorter than the prediction horizon, so the process can proceed in real time.
The predictive control model is based on the dynamics of ambient fluid flow
and fate and transport of the hazardous release.
Gradient information is obtained by use of adjoint equations, so
optimization of the control actions is achieved with the highest possible
efficiency. The control is
optimized over a finite prediction horizon and instructions are sent to the
valve manifold. Next, the sensor
arrays detect all changes effected by the control and report them to the
control model, which advances the process over the next finite horizon.
Sensing, optimization and feedback are achieved in a time period
shorter than the prediction horizon, so the process can proceed in real time.
The sensors are tested under hostile environmental conditions, gas and
liquid flow, different fluid velocities and chemical concentrations.
The optimal location, density and configuration of sensors and actuators
are established for a variety of chemical agents.
Computational techniques are also enhanced to improve the speed of
determining optimal strategies.
Finally, the proposed sensing and control model will be tested in two
large-scale applications including the McNamara terminal of the Detroit
Metropolitan airport and the Detroit-Windsor tunnel.
Hypothetical releases will be simulated based on the real geometry and
ventilation system of these facilities in order to test the model's ability to
work in real time.
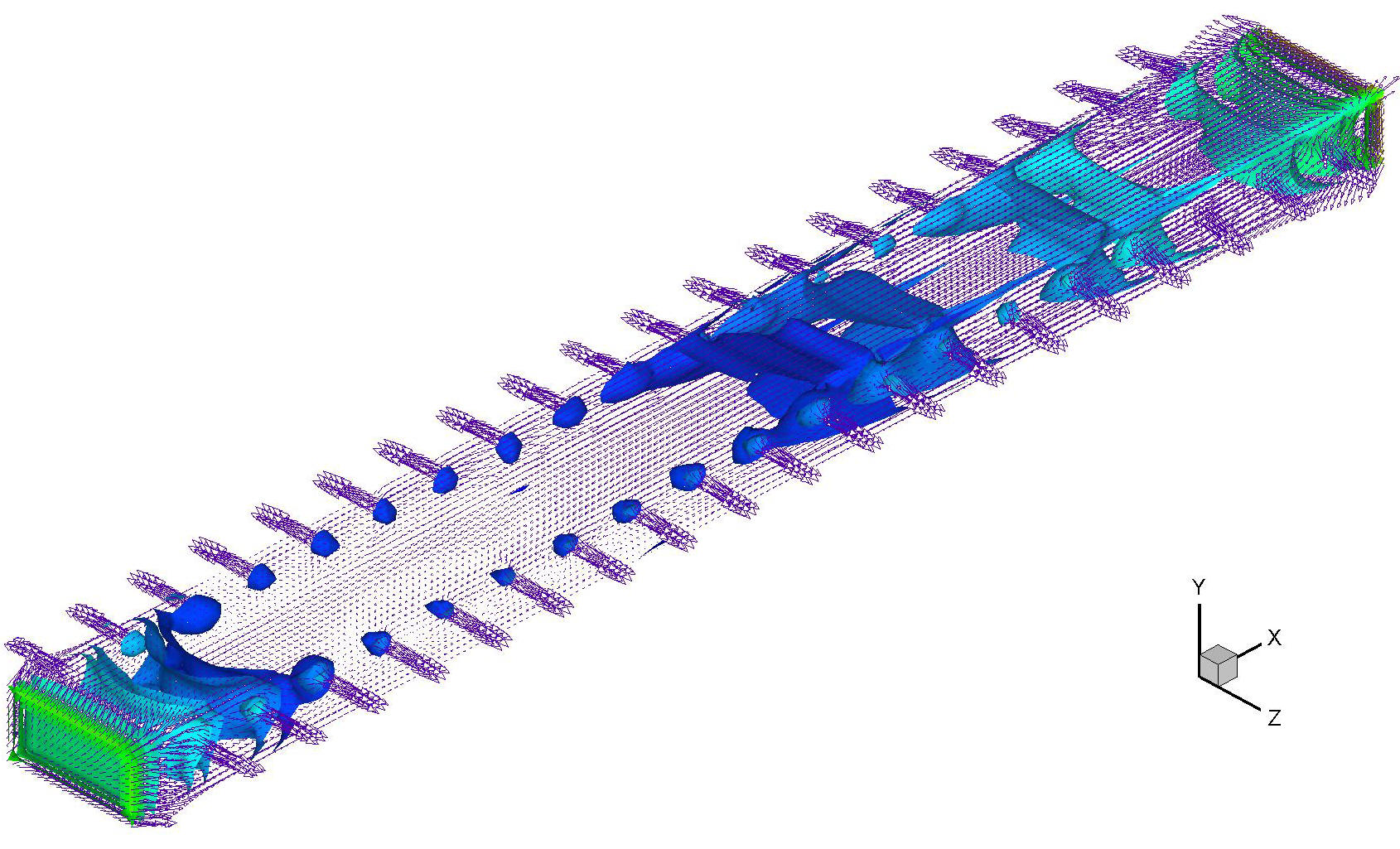
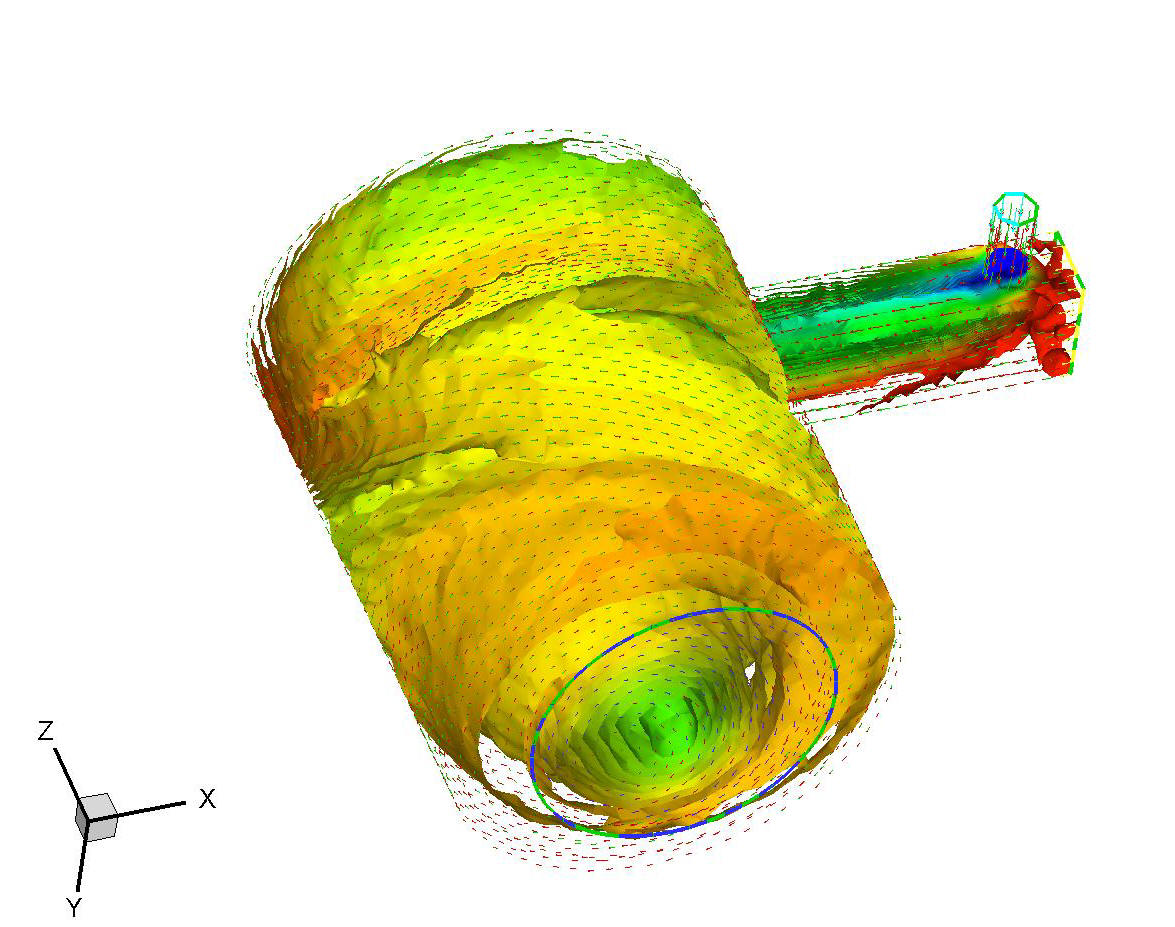
The figure shows iso-surfaces of turbulent kinetic energy as a result of
fluid suction from lateral ports in a conduit of rectangular cross section.
Monitoring turbulent intensity is important because the control action may
increase turbulent mixing and spread a hazardous chemical further.

Impact of Climate Change on Estuarine
Morphology and Aquatic Life (GESI)
The goal of this research project is to develop the
methodology for a quantitative assessment of the impact of climate changes on
estuarine and wetland morphology.
By linking some key factors of river bed morphology to biota, a quantitative
measure of the sustainability of aquatic life will also be developed.

Long-term effects of land use practices lead to erosion and
sedimentation processes that are responsible for many undesirable changes to
aquatic life. Unfortunately, the
temporal and spatial scales of this problem are so disparate that a quantitative
assessment of the impact of these practices has been previously impossible.
We propose a novel approach that can overcome these difficulties by
nesting a high resolution estuarine morphology model in a large scale watershed
model. Both models are based on
sound physical principles and are capable of capturing the true hydrodynamic
behavior within their respective domains.
The two models are mathematically compatible and have been independently
validated, so there is high confidence that their integrated results will
provide a unique method for the investigation of long-term changes in aquatic
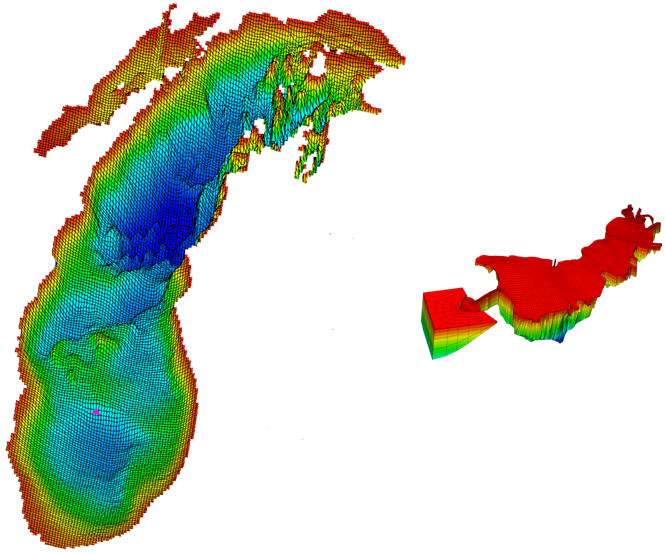
environments. The figure shows the collocation of the computational grids
of the the hydrologic and hydrodynamic models. The Voronoi cells of the
watershed model are centered on the vertices of the Delaunay triangles of the
hydrodynamic model providing a seamless flow of information between the two
models.
The integrated watershed-estuarine model
is used to
perform a formal sensitivity analysis of estuarine bed morphology to various
hydrologic changes at the watershed level.
Variations in watershed headwater land use, as well as climate changes,
directly affect the local runoff and erosion processes.
Over a long period of time these changes
also affect the width of beaches, the depth and context of sediments, the
cohesion of grain particles and the overall strength of the soil matrix.
These hydrodynamic and soil variables are be linked to an aquatic
habitat model, resulting in a robust tool for assessing the impact of climatic
change and land use practices on specific species.
By running simulation scenarios over long-term periods, we will be able
to establish quantitative measures for creating sustainable aquatic systems.
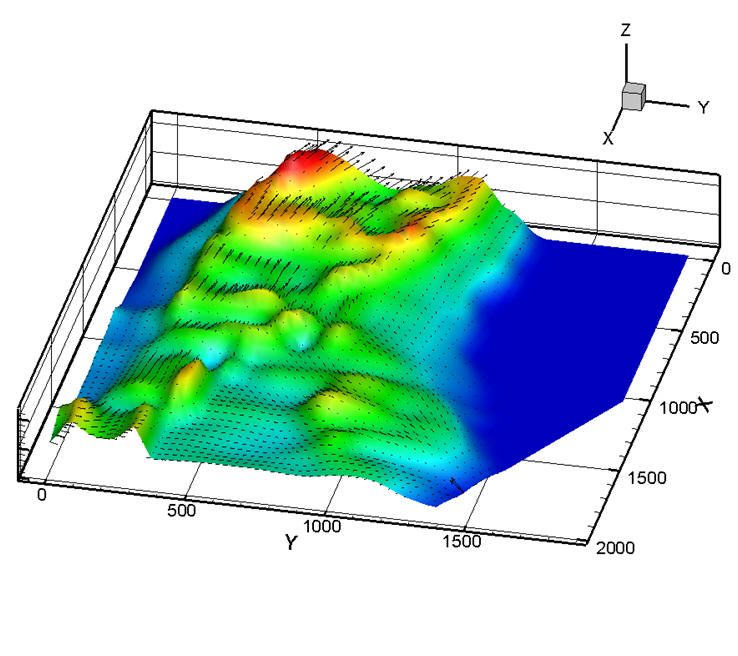
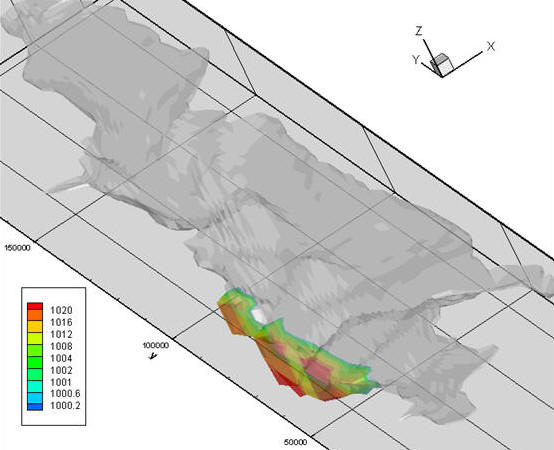
The figure below show the evolution of a typical estuary bed due to
sedimentation. Over time, sediment deposition or erosion changes the
vorticity patterns of the flow which in turn affects fish locomotion and plant
stability.
Source Identification by Adjoint Sensitivity Analysis (NSF)
This project is attempting to identify the location of a
contaminant source and the time history of its intensity from measurements
of concentration by field sensors located at some arbitrary locations.
Once a nonzero value of a chemical is detected by the sensors, each node in
a discrete model of the environment is a potential source. In
addition, each discrete time instant has the potential to correspond to a
different value of the intensity of every source. In multi-dimensional,
time-dependent problems, a formidable number of parameters needs to be
identified when attempting an inverse solution of contaminant fate and
transport. A direct solution would require numerous simulations, each
corresponding to a perturbation of a single time instant and a single
potential source in order to assess the sensitivity of the sensor
measurement to the change of the intensity at each time and node of the
model.
In this project, we employ the adjoint sensitivity
method for fast source identification. Adjoint "matter" sources are placed
at the sensor location and the adjoint equations are solved numerically on
the same computational grid with the direct problem.
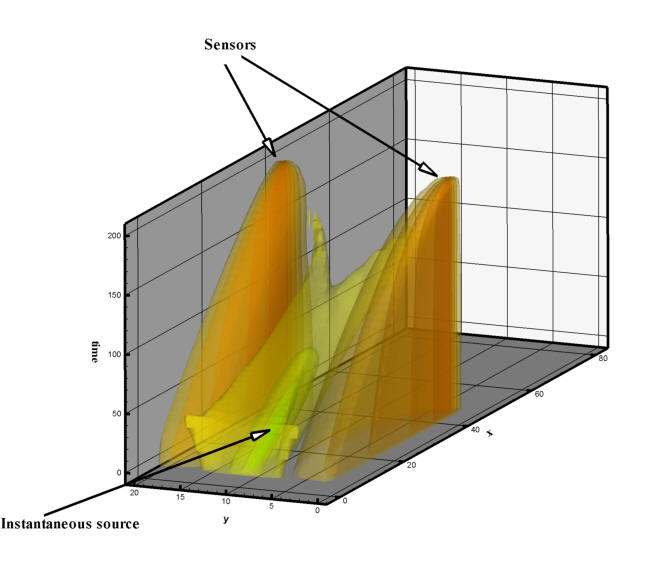
The Figure shows the regularized sensor error corresponding to the source
inversion problem of an instantaneous source using two wall-mounted sensors. Flow is from left to
right and the error results from guessing the location of the source after
performing a single simulation.
The maxima occur at the sensor locations
while
a well-defined minimum is visible at the location and time of the actual source.
The simulations involve low to medium
resolution, which is adequate for the chemical release detection problem. The
objective of this work is to capture time-averaged flow conditions over the time
scales associated with sensor sampling and signal response.
As a result, turbulent flow scales that
require higher resolution are not considered.
This has no consequences on the inversion model performance, and in
addition, by reducing the computational time, makes possible the detection of
chemical releases in real time.
Mitigation of Chemical Spills in Surface Waters
(D'Appolonia S.P.A.)
We are developing an
interactive tool for the mitigation of planned or accidental chemical spills in
rivers and estuaries. The source may be stationary or moving, known or
unknown and the chemical may be inert or reacting, immiscible or completely
mixed.
 Chemical
sensors are used to both detect and classify the spill. The location of
the sensors depends on local geometry and bathymetry. The density of the
sensor network is subject to optimal design considerations and is related on the
need of redundancy and the model's resolution. Mitigation of the spill is
based on a system of pre-installed countermeasures, again on optimally design
locations. These measures or constructs depend on the type of the spill
and may be either physical or chemical in nature. For example, oil spills
are contained by automatic deployment of floating dams. Similarly, non
buoyant spills may be eliminated by injection of counter acting chemicals.
Chemical
sensors are used to both detect and classify the spill. The location of
the sensors depends on local geometry and bathymetry. The density of the
sensor network is subject to optimal design considerations and is related on the
need of redundancy and the model's resolution. Mitigation of the spill is
based on a system of pre-installed countermeasures, again on optimally design
locations. These measures or constructs depend on the type of the spill
and may be either physical or chemical in nature. For example, oil spills
are contained by automatic deployment of floating dams. Similarly, non
buoyant spills may be eliminated by injection of counter acting chemicals.
The model
is equipped with a graphical user interface that
allows the user to execute alternative scenarios of mitigation in real time and
to alter the basic parameters of the model in order to assess the uncertainty of
the various measure that are examined.
Multi-Physics Model for Clutch Engagement (Ford Motor Co.)
We are developing a 3-dimensional, multi-physics model that
can capture the dynamics of the multi-phase flow in an open clutch, squeeze flow
during engagement, flow in the porous friction material,
asperity contact, heat transfer and plate deformation following contact. A
multiple disc system with realistic friction materials, waviness and grooves is
considered, and the results are validated with full-scale experimental
measurements.
The sketch shows a typical layout of the system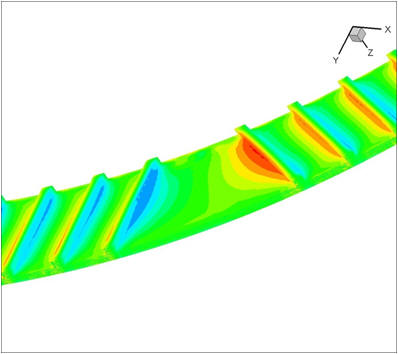 with the fluid contained between a stationary and a rotating disc. The small
rectangular channels correspond to the grooves on the porous friction material,
which is modeled separately.
with the fluid contained between a stationary and a rotating disc. The small
rectangular channels correspond to the grooves on the porous friction material,
which is modeled separately.
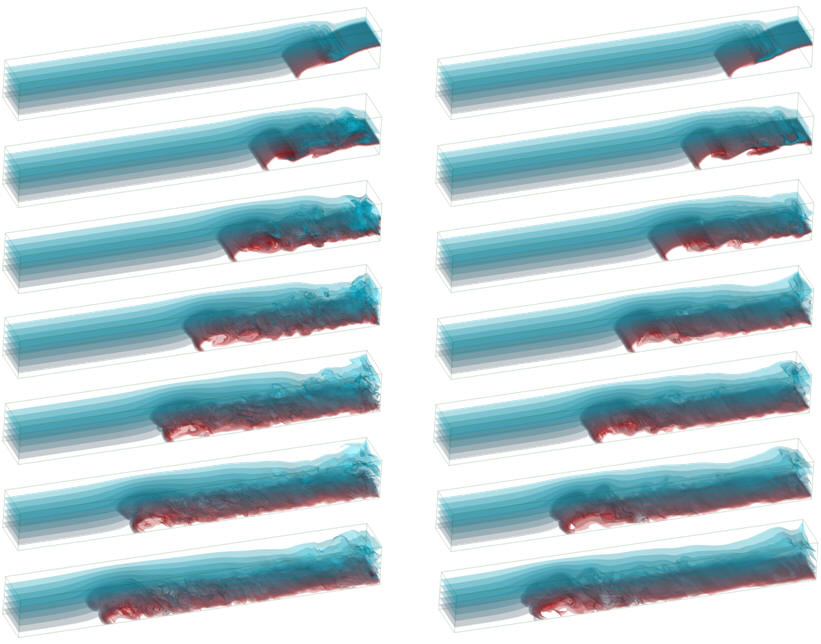
We use the Volume-of-Fluid method to capture the
multi-phase flow (oil and air) in the clearance, and an iterative algorithm that
matches the externally applied force to the fluid pressure in the gap during
engagement. A moving reference frame is employed to simulate the rotating
discs and several novel boundary conditions are introduced to account for the
lack of accurate inflow/outflow boundary data. The figure shows the results of
multi-phase flow computations in the vicinity of the grooves.
Grid Nesting of Hydrodynamic Models (CILER)
The hydrodynamics of the
ocean encompasses processes whose spatial and temporal scales differ by several
orders of magnitude. Local interaction of waves and currents, contaminant
loading at river estuaries and non-point sources, fine sediments from bluff
erosion and many similar phenomena affect the state of the entire system.
However, it is often impossible to detect and monitor such events in the ocean
because of the formidable computational effort required. It is possible to do so
in specific nearshore regions, but this cannot be done without first determining
the hydrodynamics of the whole ocean. The transfer of energy from large to small
scales is the predominant factor driving the small scale effects, whose local
features require that the nearshore processes be resolved as accurately as
possible. Furthermore, these features often modify the large scale hydrodynamic
effects, and, in the case of mass transport, almost always determine the
characteristics of the source itself.
Despite advances in computer technology, nesting a high-resolution, limited-area
nearshore model within a coarse-grid model for the ocean is the only viable
approach to capturing the details of hydrodynamic phenomena that originate in
the nearshore region, but may be of great importance to the coarsely resolved
ocean scale. In a nested grid model, the nearshore component is hydrodynamically
driven by the ocean model, so two-way passage of information is required between
the two models, which must be enforced by appropriate boundary conditions.
Furthermore, eddy energetics must converge at the nest boundaries to satisfy the
basic conservation laws. Recent developments in grid-nesting indicate that the
most difficult step of the process is the establishment of proper boundary
conditions at the nest interface and the prevention of spurious-wave generation. The problem is further complicated in non-hydrostatic flows, where internal
waves may create a pattern of flow that is not easily resolved by
characteristic-type, non-reflecting boundary conditions.
This project tries to develop
a nested scheme by developing a subspace projection method for time integration
and non-reflective boundary conditions that allow information to travel freely
through the computational boundaries of the nested grids. Although the proposed
method is designed as a general grid-nesting technique, this project focuses
exclusively on sub-domain communication issues, so nesting ratio issues are not
discussed. This allows the presentation to shed light on the transfer of
information between sub-domains without having to introduce any interpolation or
other approximation errors associated with other nesting ratios.
Multi-Domain Computations (EPA)
When a numerical
model is arbitrarily terminated by an open boundary, special boundary conditions
need to be applied at that boundary to ensure that waves travel freely through
this open boundary. Furthermore, when the open boundary represents an interface
between two separate computational grids, waves on both sides must pass freely
as well.
The technique
proposed in this project assumes that the computation can be carried independently
in two adjacent computational sub-domains. On common sub-domain boundaries, we
allow the two computational grids to overlap, as is customarily done in
nesting-grid methods for interpolation purposes. In addition, the receding
boundary method assumes a derivative boundary condition for the pressure.
Specifically, the derivative of the pressure is assumed to be zero.
This is of course a
crucial assumption. The advantage is that it allows us to independently solve the
pressure Poisson equation in each sub-domain. Hence, communications between
sub-domains are decreased. The disadvantage is that on the sub-domain boundaries
there is no incompressible correction for the velocities normal to the boundary.
This in turn results in inaccurate corrections for the velocities, and
furthermore, affects the corrections in all parts of each sub-domain, since the
errors of the velocities on the boundaries are carried to the interior through
advection and diffusion.
To minimize the
errors caused by the derivative boundary condition for the pressure, the
proposed receding boundary method makes the sub-domain boundaries in the
overlapping regions non-stationary. The overlapping parts of the two grids are
forced to move away from the boundary for a few time steps and then are reset to
their original location. When the boundary is receding, the derivative boundary
condition is applied at the last overlapping grid point for that time step. This
prevents the repeated use of the assumed derivative boundary condition at the
same location, and prevents the accumulation of errors on the sub-domain
boundaries. In addition, the inward transport of errors is also decreased
because the information outside the receding boundaries is discarded. However,
if one allows the sub-domain boundaries to continuously recede, the sub-domain
size will be eventually affected and force the overlapping regions of the
sub-domains to vanish. To prevent this from happening, the sub-domain boundaries
are reset to their original locations every few time steps.
The missing information on the reset area is duplicated from the overlapping
part of the other sub-domain.
Conjunctive Modeling of Surface and Groundwater Flow (Marmon
Corp.)
A non-hydrostatic
model for overland flow is developed for the purpose of providing the framework
for predicting the fate and transport of chemicals from surface to groundwater
and vice versa. The
technique is based on the turbulent Navier-Stokes equations for the surface wave
and Richards' equation for the movement of moisture in the underlying porous
media.
It is widely
accepted that a significant but undetermined portion of surface and
sub-surface water contamination does not originate from any specific point
sources. It is often suggested that chemicals that have been introduced in
surface water or deposited on the soil's surface find their way to natural
streams and aquifers. Our model has
evolved from a hydrologic overland flow model by
introducing a distributed source along the bed of the stream and allow
contaminants to move by longitudinal advection and dispersion.
The
hydrodynamic description has been usually based on kinematic wave
assumptions and flow into the soil has been handled by empirical infiltration
expressions. Although it has been long understood that turbulent diffusion
alone is not responsible for the movement of contaminants, the dominant
mechanism for the transport of contaminants by overland flow has not been
rigorously established. Contaminants transported by sediments have been
found to be a major contributor to non-point source pollution, but the hydrologic models are not capable of differentiating the
conditions necessary for suspension and deposition of bed materials.
The basic hypothesis of this project lies in the vertical
structure of both the overland and soil-water flow. Previous mathematical models
have unveiled a mechanism for the uptake of contaminants by overland flow,
which explains all available observations. It is believed that during surface
irrigation a surge front develops which is characterized by a turbulent,
rolling structure in the vertical
plane. Bed shear and suction reach very
high values near the front, which becomes highly erosive. Soil particles are
suspended and entrain the main body of overland flow. Desorption and
dissolution of chemicals is then possible, followed by transport of
contaminants both in solute and particulate form. Solute matter is therefore
free to infiltrate into the soil where it re-adsorbs and perhaps reaches the
ground water. It is clear that to model the aforementioned processes we need
a two-dimensional model that can account for vertically varying velocity
components and shear stresses, allows for the turbulent diffusion of solute
matter, sediment suspension and deposition, and simultaneously couples the
surface flow to the subsurface movement of moisture.
Multiphase Flow, Agitation and Mixing (Lafarge NA)
Several
manufacturing processes
depend on the efficient mixing of water,
powder, foam and small amounts of certain additives.
Mixing implies
that initially separated phases eventually become randomly distributed into each
other.
This is typically achieved by
agitation, i.e. induced motion of the materials in a specific way, usually in a
circulatory pattern inside some sort of container.
Large surface areas and reduction in thickness of material elements are very
important for mixing, as the separate phases come in contact and allow molecular
diffusion to occur.
Similarly, in
liquid-gas mixing, shear stresses lead to a reduction in bubble size and promote
mixing.
In an orbital mixer, the
velocity gradient in the radial direction causes shearing of the fluid elements,
so after each revolution they experience a reduction in thickness, thus
achieving mixing in a compact container.
Agitation is the
cumulative effect
of shear
stresses over time.
In calculating the shear forces and time a material spends under shear
forces, we must take into account the significant variability of shear stresses
across the entire volume of the device.
Therefore, to quantify the agitation associated with an entire device,
we must compute the integral of the shear stresses.
Unlike the normal
stress which identifies with a scalar variable in a static fluid, the shear
stress is a tensor, or a two-dimensional array.
In
three space dimensions, this tensor has nine components.
Furthermore, in turbulent flow the dominant part of the shear stress
comes from the
Reynolds stresses,
which are generated by turbulent fluctuations of fluid velocity.
The model used in this
work calculates the local values of all
the components of both viscous and Reynolds stresses
and integrates them over the
entire volume of a mixing device. We
also compute the integral of the local
enstrophy, which measures the fluid's ability to stretch and fold.
Nonlinear Interactions of
Stratified Flow in Lakes and Estuaries (EPA)
 In practical applications of three-dimensional
hydrodynamic models, it is often argued that high-order accuracy of computation
and fine resolution of density fronts is not necessarily a point of primary
concern because a plethora of other factors dominate the performance of the
model. This is often true and
especially in cases where there is great uncertainty associated with the input
data, it is hard to argue the value of a 5% improvement in the location or
sharpness of a salinity or thermal front at the mouth of an estuary is worthy of
serious consideration.
In practical applications of three-dimensional
hydrodynamic models, it is often argued that high-order accuracy of computation
and fine resolution of density fronts is not necessarily a point of primary
concern because a plethora of other factors dominate the performance of the
model. This is often true and
especially in cases where there is great uncertainty associated with the input
data, it is hard to argue the value of a 5% improvement in the location or
sharpness of a salinity or thermal front at the mouth of an estuary is worthy of
serious consideration.
 On the other hand, there exist practical applications
where such an improvement in accuracy can result in dramatic changes in a
model's predictive ability of certain phenomena.
In particular, a variety of hydrodynamic phenomena depend entirely on
exceeding certain thresholds that lead to solution bifurcations and often a
chaotic behavior, depending on the branch that is followed.
For example, it makes a great difference if a salinity front is arrested
before or after a sewage outfall in an estuary or if excess numerical
dissipation induces cohesive sediment flocculation where it is really absent.
On the other hand, there exist practical applications
where such an improvement in accuracy can result in dramatic changes in a
model's predictive ability of certain phenomena.
In particular, a variety of hydrodynamic phenomena depend entirely on
exceeding certain thresholds that lead to solution bifurcations and often a
chaotic behavior, depending on the branch that is followed.
For example, it makes a great difference if a salinity front is arrested
before or after a sewage outfall in an estuary or if excess numerical
dissipation induces cohesive sediment flocculation where it is really absent.
The figure shows
the simulation of a thermal current from Lake Michigan entering
Green Bay.
Our study shows a high sensitivity of the thermal front on the model's
ability to resolve discontinuities. We
investigate the impact of high-resolution schemes in a practical
application involving a complex environment.
The model has the ability to employ several numerical formulations and we
plan to show that in certain cases what appears to be a marginal improvement in
accuracy can lead to major differences in the predicted flow conditions.
Active Mitigation of Flood Waves (NSF)
We develop a mathematical technique for
active flood hazard mitigation. The procedure is based on the hypothesis that
passive measures are not available or are inadequate, and a hazardous flood wave
is already propagating in the river system. For example, a levee protecting a
municipality has already been breached or its failure is imminent and real-time
responses are needed to mitigate the impact of the flooding. The proposed method
is also based on the assumption that there exist one or more alternative
locations for emergency flow diversion, which can diminish the damages from the
collapse of the levee, and even prevent its failure altogether.
The proposed method will scan the entire river basin in the vicinity of the
endangered levee, identify the optimum location for a flow diversion,
and provide the optimum time schedule for intervention. The decision will be
based on information derived from a two-dimensional, river-floodplain simulation
model with a dynamic lateral flow withdrawal component. The optimum location and
timing of this flow diversion will be determined in real time by mapping the
problem on the adjoint space, which determines the associated sensitivities and
optimization gradients with just two runs of the model.
The actual flood
mitigation is accomplished by an optimum spatial and temporal combination of
on-demand storage relief and the focusing of depression waves on the endangered
levee location. The first reduces the severity of the approaching flood wave by
providing off-line storage on adjacent flood plains. The second directs a family
of depression waves towards the endangered levee, thus negating directly the
impact of the flood wave. The optimum combination of these measures in real time
is achieved by use of the adjoint equation method for shallow-water flow.