Control of Redundantly-Actuated Hybrid Feed Drive
Related Publications: Journal [3,6,7,10,11], Conference [7,10,11,13]
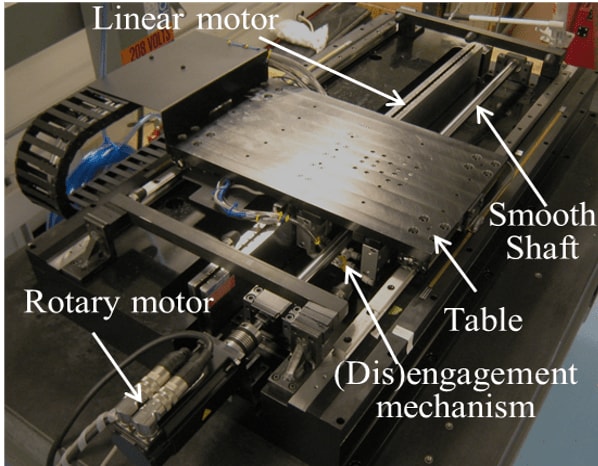
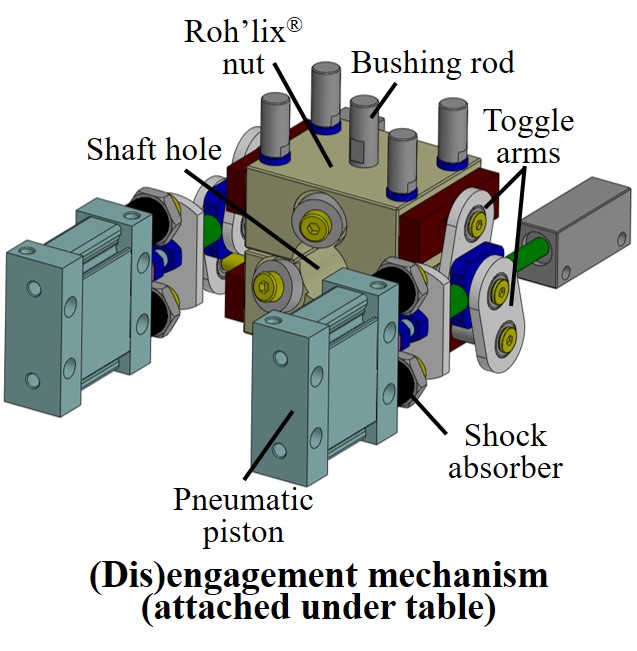
Hybrid feed drive (HFD) is a precise and energy efficient solution for motion delivery in machining applications. The hybrid concept arises from two basic machining operations: rapid positioning and cutting. The rapid positioning desires high speed; while in cutting the speed is relatively slower, however stringent tolerance is required under significant cutting force. To address the drastic different needs of the two operations, actuators of different types are employed. As shown in the figure, a fast, precise, but energy costly linear motor drive (LMD), is combined with an energy efficient screw drive (SD) with lower speed and precision. This combination of SD and LMD is reconfigurable based on operations. For rapid motion, the LMD drives the table alone to achieve high speed; for cutting motion, both LMD and SD are synergistically employed–SD provides the holding force to reduce energy consumption while the LMD fine-tunes the tracking performance for precision. The (dis)engagement of the rotary motor in the SD is achieved through a reconfigurable friction drive device Roh’lix. The Roh’lix translates the rotation to linear motion like traditional screw drive, however (dis)engages freely across the shaft with the help of pneumatic actuated toggle mechanism.
This dual-input-single-output redundantly-actuated system requires dedicate control design for the two actuators to collaborate desirably. A computational-efficient energy optimal control allocation scheme is proposed. The optimal control ratio between the actuators is derived and an energy efficiency metric (proxy) is defined accordingly. The proxy is theoretically shown to measure the deviation from the optimal ratio, and thus the regulation of the proxy allocates the control efforts. The proxy-based control allocation is compatible with various regulator design methodologies and saturation-type input constraints. This method has been further extended to multi-input multi-output system; a robust control allocation scheme which considers the model uncertainty is currently under investigation.
Vibration Compensation of Feed Drives with Structural Flexibility
Related Publications: Journal [2,5,8,9,10,13], Conference [6,8,12,14], Patent [1], Magazine [1]
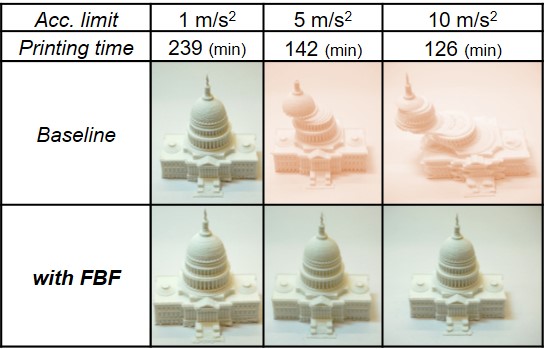
Tracking control aims to minimize the errors of a system’s output in following a desired trajectory. This is achieved through both feedback (FB) control and feedforward (FF) control. A FF controller uses a priori knowledge of a given system and its input(s) to influence the system’s output(s) in a pre-defined way, and is often used to augment the FB controller, which has limited tracing performance since it must wait for the error to develop before reaction. One general structure of the FF control is to modify the reference trajectory according to the desired trajectory and the system dynamics. Theoretically, perfect tracking can be achieved through direct inversion of a sufficiently accurate system model. However, direct inversion may not be applied to system with non-minimum phase (NMP) zeros, which is prevalent in practice. To address the tracking control problem within NMP system through trajectory generation, I proposed the filtered basis functions (FBF) method. It decomposes the modified trajectory into a set of basis function with unknown coefficients, which are selected to minimize the error in tracking the desired trajectory. This method avoids direct inversion, can incorporate additional constraints on the modified trajectory, and is shown to be less susceptible to NMP zero locations compared to other methods. Moreover, constraints on the trajectory can be conveniently embedded into FBF. The proposed FBF method is validated in experiments to effectively reduce the vibration-induced tracking error, and thus allows production of high-quality part with less time.
Reduced-Order Modeling of Ball Bearing and Screws for Electrical Power Assisted Steering
Related Publications: Journal [4], Conference [5,9]
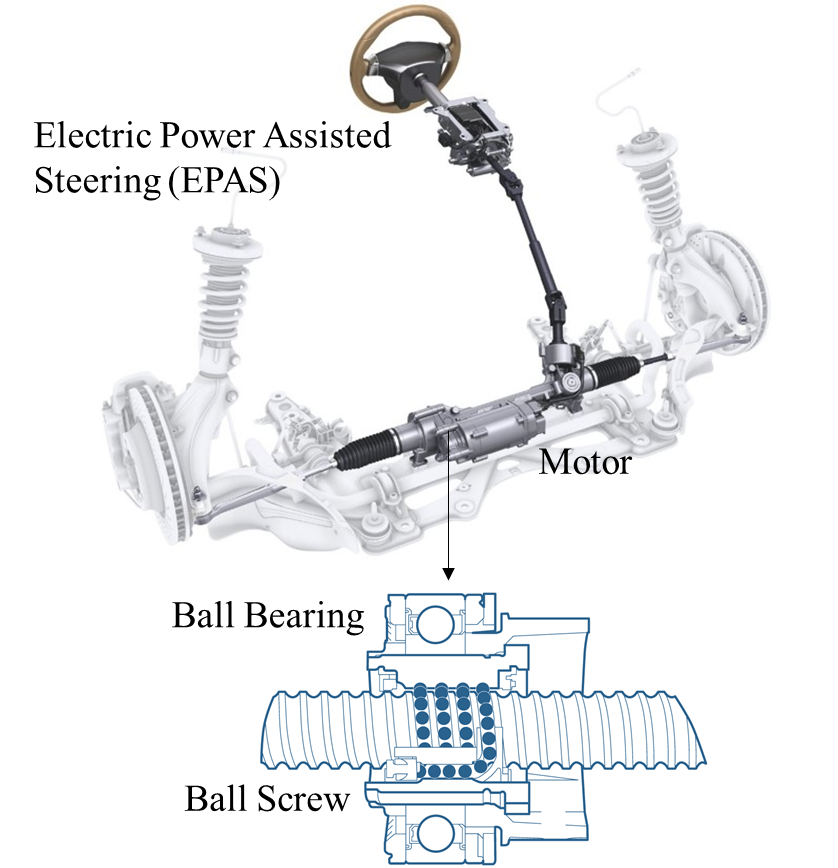
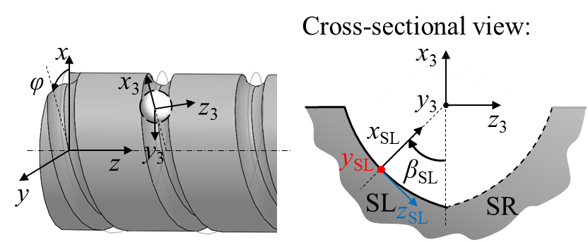
Electric power assisted steering (EPAS) systems are widely adopted in modern vehicles; it uses an electric motor to assist steering and thus significantly reduces the driver’s steering effort. One common issue in EPAS system, particularly among heavy-duty vehicles, is the so-called “stick-slip” problem (“sticky feel” experienced by the driver). This problem leads to oversteer, which may further cause safety hazard. The “stick-slip” problem arises from the friction inconsistency of two critical mechanical components in EPAS (i.e. ball bearing and ball screw), and is prominent in the presence of large external load or manufacturing error. To help enhance the design, manufacturing and inspection specifications of EPAS components, a good understanding of load distribution and friction variation in ball bearings and ball screws is required. This project aims to provide a reduced model of ball screws and bearings while still capturing the key features such as lateral (bending) deformations of the screw shaft, geometric errors, and ball-to-ball contact. In comparison with the high-fidelity FEA analysis, the reduced order models are more computationally efficient, provide more insights, and can be further employed in real-time control and estimation.
Maneuver and Gust Load Alleviation of Flexible Aircraft
Related Publications: Conference [1,3,4]
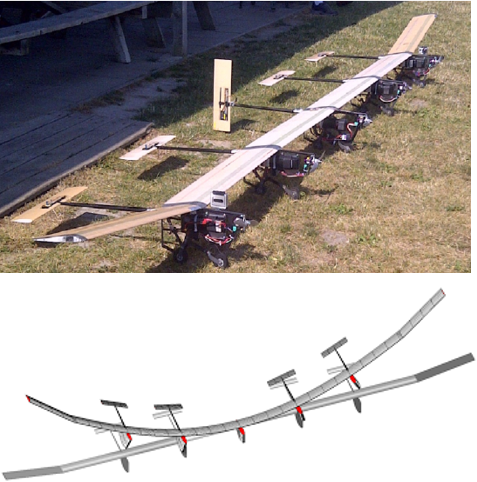
High aspect-ratio wings and light structures are increasingly used in aircraft design. They increase the lift, reduce the drag, and minimize the weight of the aircraft. However, naturally, they introduce more flexibility, which could result in catastrophic structural failure when aircraft encounters excessive maneuver or gust. To avoid the structural failure, local high load in flexible aircraft should be estimated and alleviated. In this project, maneuver and gust load alleviation schemes are developed through the control allocation framework. The control allocation framework aims to redistribute the control efforts from an existing aircraft controller, in a way that the load (and other flexible states) at critical locations are confined while the rigid body motion is invariant. This allocation is possible since there usually exist more control inputs than the rigid body degree of freedom in flexible aircraft. The proposed methods are validated on a flexible aircraft X-HALE developed in University of Michigan, Ann Arbor.