Select Projects
SmartCarts: Autonomous Local Transportation
 This project uses a 3D-printed autonomous "golf cart" to transport riders
from various known locations. We're hoping to get a fleet of these in
order to study various problems that arise in request and pick-up
scheduling, route-planning, multi-vehicle systems, and human interaction.
Initial work done at
Mcity included a system in which a user could request a pick-up,
the autonomous vehicle would navigate to an arranged location, and then
drive the user to their selected destination while providing information
about the route and the vehicle's expected actions.
You can see a trailer for the segment Daily Planet filmed
here!
(Full video available on their website for paid subscribers.)
This project uses a 3D-printed autonomous "golf cart" to transport riders
from various known locations. We're hoping to get a fleet of these in
order to study various problems that arise in request and pick-up
scheduling, route-planning, multi-vehicle systems, and human interaction.
Initial work done at
Mcity included a system in which a user could request a pick-up,
the autonomous vehicle would navigate to an arranged location, and then
drive the user to their selected destination while providing information
about the route and the vehicle's expected actions.
You can see a trailer for the segment Daily Planet filmed
here!
(Full video available on their website for paid subscribers.)
360° Emergency Stop Sensor
 Our ground robots need to be able to operate autonomously as well as by
human-driver in regions filled wtih both positive and negative obstacles.
A lidar, mounted at an angle on top of the robot, sweeps an ovular shape
around the robot and tests where it's safe for the robot to drive based
on a short history of previous scans. This allows the robot to identify
hills and ramps with reasonable grades to drive on but keeps it from
turning or backing into stairs or other obstacles.
Our ground robots need to be able to operate autonomously as well as by
human-driver in regions filled wtih both positive and negative obstacles.
A lidar, mounted at an angle on top of the robot, sweeps an ovular shape
around the robot and tests where it's safe for the robot to drive based
on a short history of previous scans. This allows the robot to identify
hills and ramps with reasonable grades to drive on but keeps it from
turning or backing into stairs or other obstacles.
Affordance Recognition
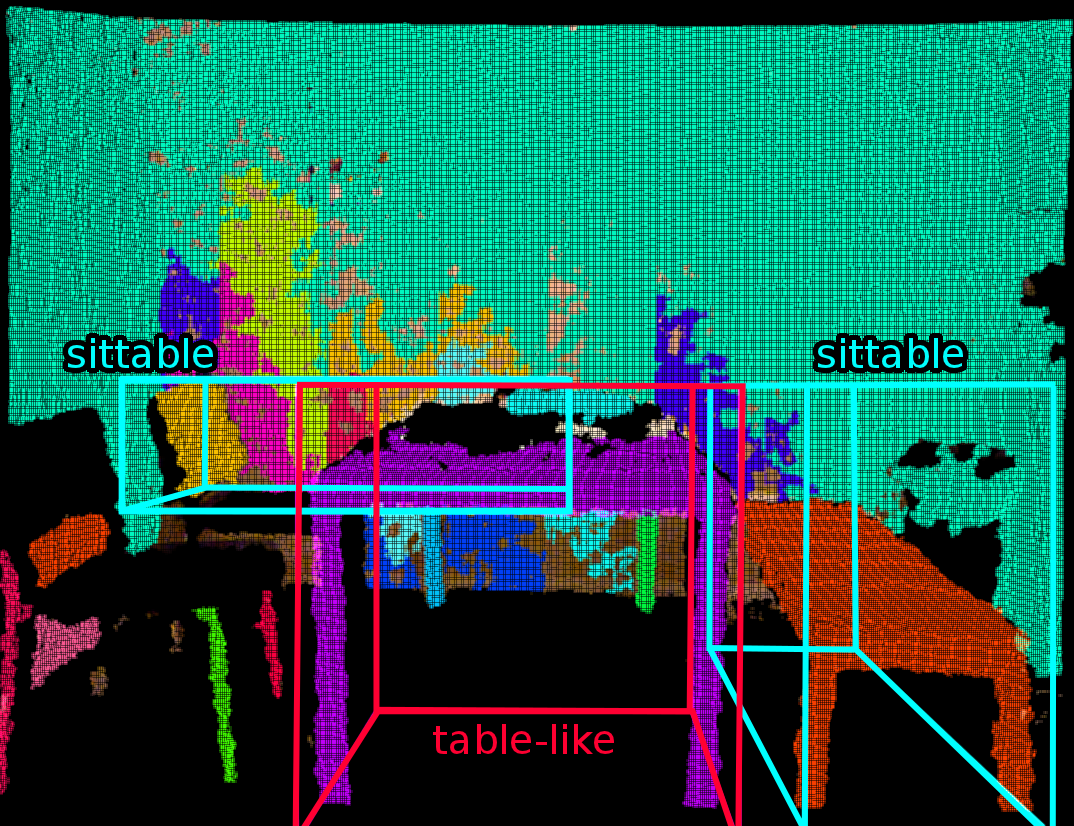 Unlike most affordance-learning systems, we hypothesized that some types of
functionality could be predicted using simulation instead of interaction.
We created a simulation using a physics-based model to explore how what
types of features can be extracted from a 3D pointcloud of an object using
simulated interactions. In particular, we focused on how raining spheres of
varying size onto an object and considering the resulting distribution of
how they settle. We were able to distinguish such affordances as "sittable",
"cup-like", "table-like", etc.
Look at my
papers for
more information.
Unlike most affordance-learning systems, we hypothesized that some types of
functionality could be predicted using simulation instead of interaction.
We created a simulation using a physics-based model to explore how what
types of features can be extracted from a 3D pointcloud of an object using
simulated interactions. In particular, we focused on how raining spheres of
varying size onto an object and considering the resulting distribution of
how they settle. We were able to distinguish such affordances as "sittable",
"cup-like", "table-like", etc.
Look at my
papers for
more information.
BOLT - Broad Operational Language Translation
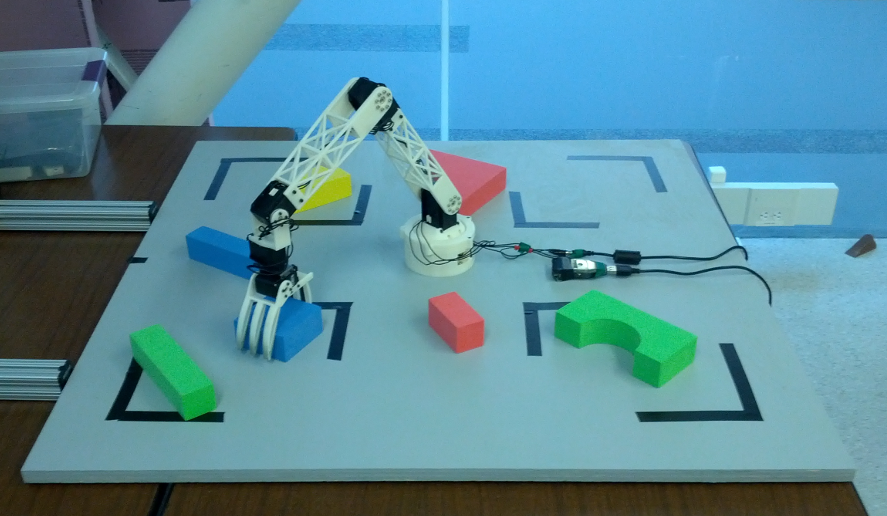 The goal of the Broad Operational Language Translation (BOLT) project,
was to ground language in sensory data from the real world using an
interactive robotic system. Our system uses a robotic arm, a Kinect for
RGBD data, and the SOAR cognitive architecture to learn about its
environment through interaction with a mentor. The robot learns relevant
object properties by seeing, touching, and moving the object. Interaction
with a human mentor helps the robot connect human language to the
properties it has discovered. The work focused on the mechanics of
getting a physical system working, communication and information sharing
between a cognitive architecture and a Bayesian reasoning system, and
learning from minimal examples.
The goal of the Broad Operational Language Translation (BOLT) project,
was to ground language in sensory data from the real world using an
interactive robotic system. Our system uses a robotic arm, a Kinect for
RGBD data, and the SOAR cognitive architecture to learn about its
environment through interaction with a mentor. The robot learns relevant
object properties by seeing, touching, and moving the object. Interaction
with a human mentor helps the robot connect human language to the
properties it has discovered. The work focused on the mechanics of
getting a physical system working, communication and information sharing
between a cognitive architecture and a Bayesian reasoning system, and
learning from minimal examples.
Soft-Keyboard Design
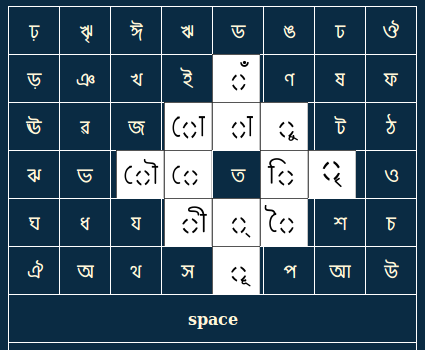 Soft-keyboards, those used on phones, tablets, or other touch-screens,
have the benefit of being easily modifiable for different languages so
that people can type optimally. This research, done at UCCS, explored
how optimal keyboards for languages with several times the number of
characters as English (including diacritics) can be designed. The work
focused on using genetic algorithms for Brahmic scripts, although other
optimization techniques and languages were also tested. This work
included both theoretic and experimental results obtained with users
around the world. Look at my
papers for
more information.
Soft-keyboards, those used on phones, tablets, or other touch-screens,
have the benefit of being easily modifiable for different languages so
that people can type optimally. This research, done at UCCS, explored
how optimal keyboards for languages with several times the number of
characters as English (including diacritics) can be designed. The work
focused on using genetic algorithms for Brahmic scripts, although other
optimization techniques and languages were also tested. This work
included both theoretic and experimental results obtained with users
around the world. Look at my
papers for
more information.
Neural Net Backgammon
 My senior year project at Colorado College was a replication of several
papers on TD-Gammon by Gerald Tesauro. TD-Gammon uses Temporal-Difference
learning (a type of reinforcement learning) on a neural network to teach a
computer to play backgammon by repeatedly playing itself and receiving
positive or negative feeback at the end of the game based on whether it
won. It was quite the learning experience for me, as I wrote everything
from scratch. Ultimately, my version of TD-Gammon was able to regularly
beat me. But then I don't claim to be particularly savvy at backgammon.
My senior year project at Colorado College was a replication of several
papers on TD-Gammon by Gerald Tesauro. TD-Gammon uses Temporal-Difference
learning (a type of reinforcement learning) on a neural network to teach a
computer to play backgammon by repeatedly playing itself and receiving
positive or negative feeback at the end of the game based on whether it
won. It was quite the learning experience for me, as I wrote everything
from scratch. Ultimately, my version of TD-Gammon was able to regularly
beat me. But then I don't claim to be particularly savvy at backgammon.