Research Projects

|
From High-Level Task Specifications to Low-Level Geometric Control via Lyapunov Abstractions
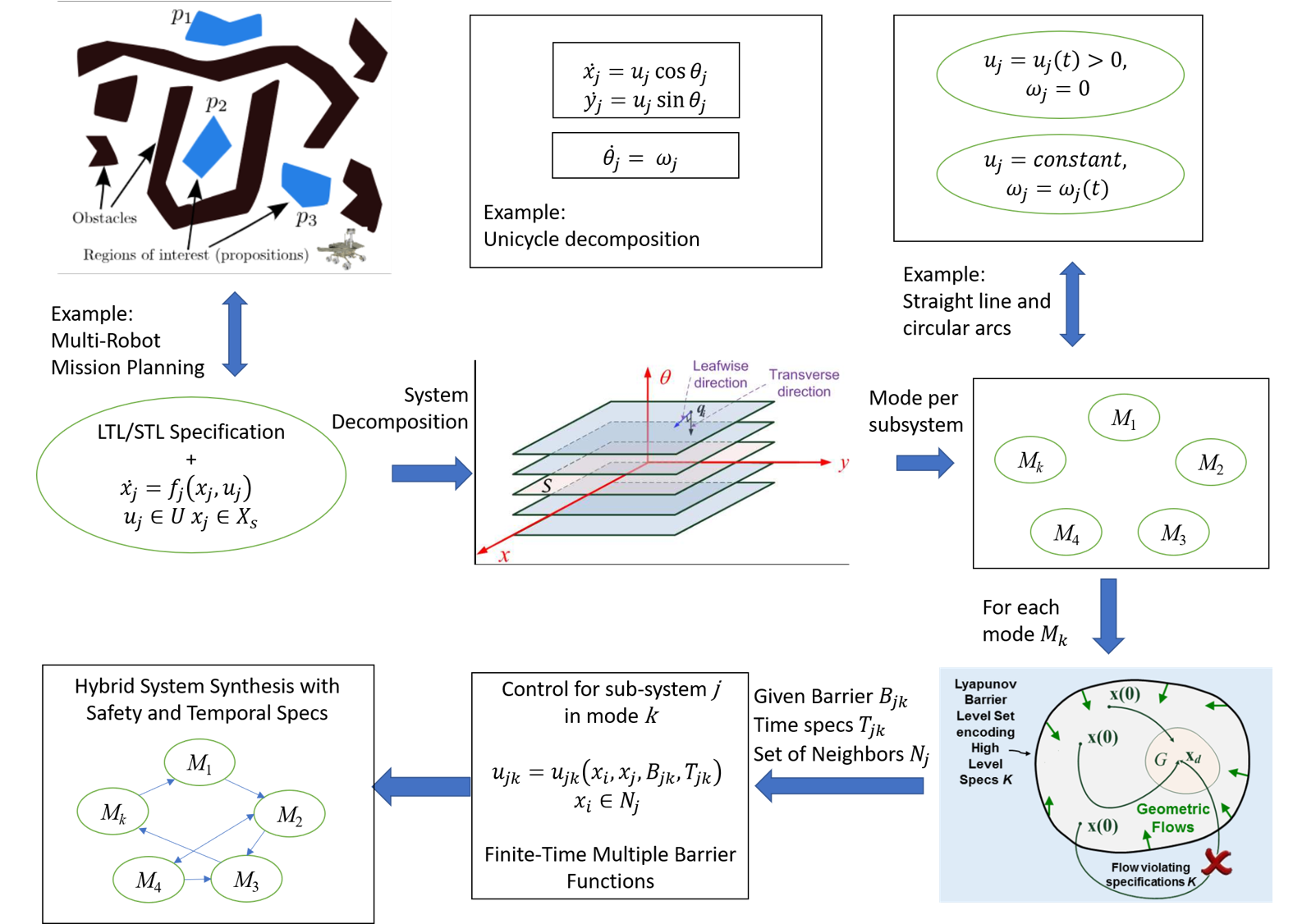
The goal of this research project is to narrow the existing gap between high-level discrete task planning and low-level continuous control in complex multi-agent missions within a control-theoretic framework. The main idea lies on the pairing of a Lyapunov-like barrier function and a geometric flow using notions and tools from geometric control and dynamical systems theory. The proposed method offers a reactive motion planning, decision-making and control design mechanism that is scalable with the number of agents and tasks, and thus applicable to large-scale systems involving hundreds of agents.
Robust Multi-agent controlVector-field based control design:
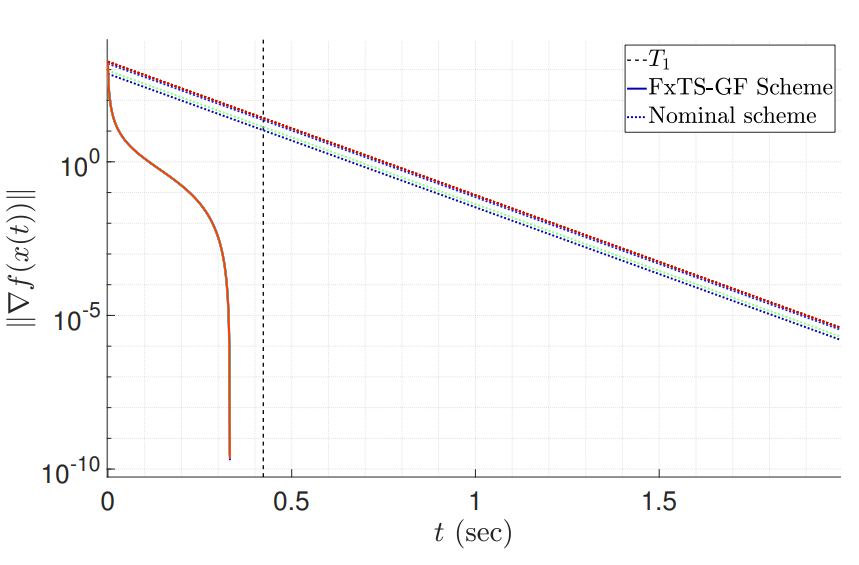
We worked on designing safe and robust path planning algorithms for multi-agent systems. The vehicles considered can be multi-rotors or fixed-wing UAVs. We devised robust path planning algorithms for multi-agent deconfliction in the presence of sensor uncertainties, wind disturbances and measurement errors, and computed safe controllers in a distributed manner. (References: AIAA GNC'19, AIAA JGCD '19). Quadratic program based control design: Then, we explored Quadratic Program (QP) based method for a systematic way of control synthesis for multi-objective problems involving spatio-temporal constraints (see CDC' 19 paper, arxiv preprint). We proposed a new class of Control Lyapunov Functions (CLFs) termed as Fixed time-CLFs along with Control Barrier Functions to guarantee convergence of the closed-loop trajectories to a goal set, within a fixed time, while maintaining safety with respect to unsafe set(s). Our more recent results include robustness analysis of FxT-CLFs (CDC'20) and non-smooth analysis for optimization based control design (CDC'20). Fixed-time Stable optimization schemesWe explored the theory of Fixed-time stability to design modified fixed-time gradient flows (FxTS-GF) for solving constrained and unconstrained optimization, and min-max problems within a fixed time (see our TAC '20 paper). We extended the idea to a general Distributed Optimization framework in this paper, and to the specific problem of Distributed Economic Dispatch in this paper. Our results can also be used for Sparse-recovery within fixed time as shown in this paper.
State Estimation and Kalman FiltersI have previously worked on Extended Kalman Filter and its adaptive derivatives. I am keen to develop improved state estimation algorithms for attitude and position determination of aerial vehicles. I would be really interested in applying this knowledge for the development of control laws to increase their effectiveness as well as reliability.
|