Previous Research Experience
|
Visiting International Research Student at University of British Columbia
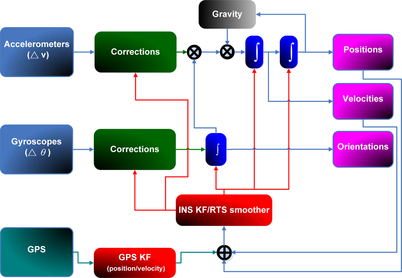
The project aims towards development of a new gimbal stabilizer for camera mount which instead of conventional servo-motor controllers, uses linear actuators to increase the payload capacity of the system. My job was to model the mechanical system and develop the controller to achieve a desired attitude with the help of two IMU modules each mounted on platform and camera gimbal. I implemented an advance adaptive algorithm for attitude estimation using inertial sensors in order to control the gimbal. Finally, with the help of two IMU reading making loop closed, I programmed and tuned a PID controller for the system. I worked primarily on MATLAB, with modelling done in LabVIEW and final implementation done on the system using a Raspberry computer. Central Scientific Instruments Organization, Chandigarh The aim of this project is to implement and further improve the current techniques for attitude determination of air-vehicles. I studied the concept of adaptive filtering, the online learning process to adapt filter parameters according to changing environmental conditions and implemented various techniques of adaptation, involving innovation-sequence based, residual-sequence based and process based adaptation. I implemented this concept, first on adaptive filters to find that results indeed improved. Then I applied this concept to sliding window filter and integrated the adaptation technique to this algorithm to get the maximum possible accuracy level. Bachelor's Thesis : Flutter Mitigation using Active Feedback Control Project aims to solve the classic flutter problem to predict flutter speed in order to delay the bifurcation by means of active feedback control. We studied analytical solutions to establish relation between flutter and divergence speed for various wing geometries. We also demonstrated significant increment in flutter speed using boundary-moment control law via simulations. Attitude Estimation Using Sun-Sensors Project aims to integrate sun-sensor measurements with INS to determine the attitude of an aircraft. Various attitude estimation methods viz. Triad Algorithm, q-method and QUEST-algorithm, are studied and compared for their performance in presence of sensor noise. A Kalman filter based attitude estimator is formulated which adaptively weighs different sensors' measurements to improve the accuracy level. |


|
Extra-curricular Activities
Team Rakshak
|
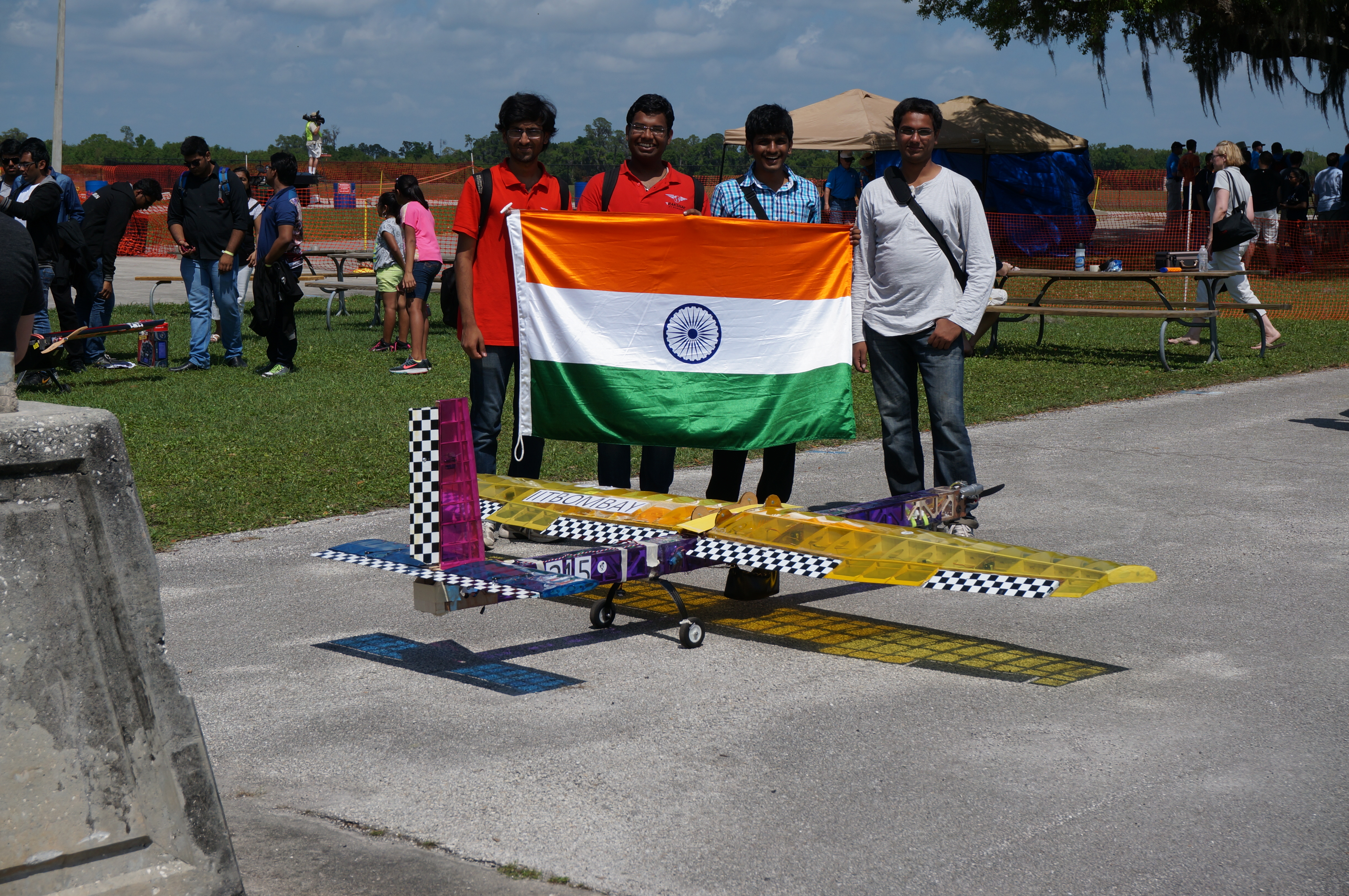
I have worked as head of the instrumentation sub-division of a technical team in our institute, namely Rakshak (meaning “Saviour”), with the vision of development of UAV for search and rescue mission and surveillance. We worked towards developing algorithms for autonomous takeoff and landing, waypoint-navigation and path-planning of the aircraft. Targeted participation in AUVSI-Student Unmanned Air Systems 2016 competition which demands total autonomy of flight, Sense-Detect and Avoid obstacles, autonomous recognition of terrestrial objects using image processing and ability to communicate with a third-party network over Wi-Fi.
|
|
Department Academic Mentorship Program
|
Led a team of 21 mentors to guide the department students in academic endeavours.
As a student representatives in Department Undergraduate committee, we actively raised students' concerns among faculty members and worked as a link between the faculties and the students. Our team also conducted tutorial sessions for weak students before exams to improve their performance. We closely monitored their performance and guided them to keep their academics on track. |
|