The Hoverbot -- An Electrically Powered Flying Robot
 This
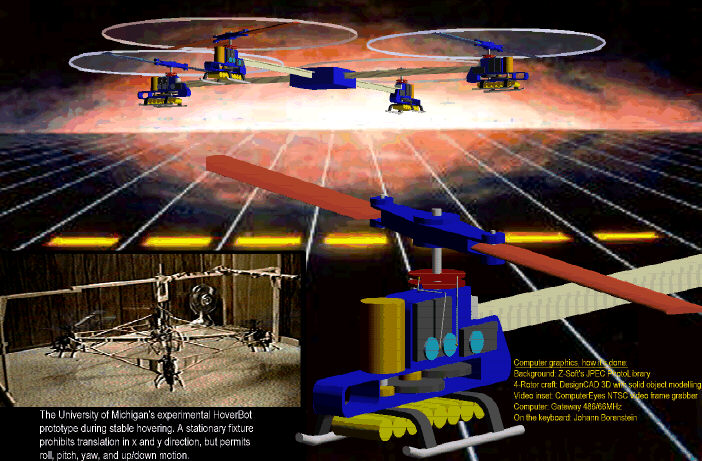
was a fun project, while it lasted. Except, it lasted only three months.
In this time we got the 4-rotor contraption to take off, and hover relatively
stably above ground. However, the Hoverbot was confined in
x and y direction by a support fixture (see inset in the illustration above,
which shows the Hoverbot during stable hovering). Yaw, pitch, roll, and
elevation (motion in the z-direction) were controlled and stabilized by
the computer.
This
was a fun project, while it lasted. Except, it lasted only three months.
In this time we got the 4-rotor contraption to take off, and hover relatively
stably above ground. However, the Hoverbot was confined in
x and y direction by a support fixture (see inset in the illustration above,
which shows the Hoverbot during stable hovering). Yaw, pitch, roll, and
elevation (motion in the z-direction) were controlled and stabilized by
the computer.
The reason for discontinuation of the project was the sponsor's stopping
of financial support. We accepted that cut with grace, because the project
was an experimenter's nightmare: For example, the rotary wings on the four
rotor heads had to be hand-crafted from balsa wood, because one cannot
buy rotary wings for both cw and ccw direction. Consequently, the rotary
wings were difficult to balance, causing serious vibration problems. There
were many more experimental difficulties, but I don't want to go into all
those.
Still interested? There is an annual "Aerial Robot Competition."
One contact is: michelsn@prism.gatech.edu. Some video footage on these
contests can be obtained from Future Watch
Program 44, #2 Air Date: June 20 1992
Library Tape Sales
One CNN Center
P.O. Box 105366
Atlanta, Georgia 30348-5366
Tel. (404) 827-1500
If you would like to get good documentation on the 1991 event (the
first year that the competition was held), you can get a tape (I don't
know if there is a charge) from:
Scientific American Frontiers
Program 202 "Aerial Robots"
c/o The Chedd-Angier Production Company
70 Coolidge Hill Road
Watertown, MA 02172
Tel. (617) 926-8300
This file last updated on 07/04/96 by Johann Borenstein.
Email: johannb@umich.edu