Gyrodometry: A New Method for Combining Data from Gyros and Odometry
in Mobile Robots
 Gyrodometry
is a simple, yet very effective method for combining measurements from
a gyro with measurements from wheel encoders (odometry). Sensor-fusion
of this kind has been done before, usually by means of a statistical model
that describes the behavior of the gyro and the behavior of the odometry
component. However, because these systems are based on models, they cannot
anticipate the unpredictable and potentially "catastrophic" effect
of larger bumps or objects occasionally encountered on the floor. By contrast
Gyrodometry has been developed based on a careful study of the physical
interaction between the ground and the vehicle. We have found experimental
evidence that non-systematic odometry error sources (such as bumps) impact
the vehicle only during very short periods; typically a fraction of a second
for each encounter. During these short instances the readings from the
gyro and from odometry differ significantly, while in the absence of large
non-systematic errors the readings are very similar. Gyrodometry makes
use of this observation by using odometry data only -- most of the time,
while substituting gyro data only during those brief instances during which
gyro and odometry data differ substantially. This way the ill-effects of
gyro drift are almost completely eliminated, and our method can thus make
use of inexpensive gyros with large drift rates.
Gyrodometry
is a simple, yet very effective method for combining measurements from
a gyro with measurements from wheel encoders (odometry). Sensor-fusion
of this kind has been done before, usually by means of a statistical model
that describes the behavior of the gyro and the behavior of the odometry
component. However, because these systems are based on models, they cannot
anticipate the unpredictable and potentially "catastrophic" effect
of larger bumps or objects occasionally encountered on the floor. By contrast
Gyrodometry has been developed based on a careful study of the physical
interaction between the ground and the vehicle. We have found experimental
evidence that non-systematic odometry error sources (such as bumps) impact
the vehicle only during very short periods; typically a fraction of a second
for each encounter. During these short instances the readings from the
gyro and from odometry differ significantly, while in the absence of large
non-systematic errors the readings are very similar. Gyrodometry makes
use of this observation by using odometry data only -- most of the time,
while substituting gyro data only during those brief instances during which
gyro and odometry data differ substantially. This way the ill-effects of
gyro drift are almost completely eliminated, and our method can thus make
use of inexpensive gyros with large drift rates.
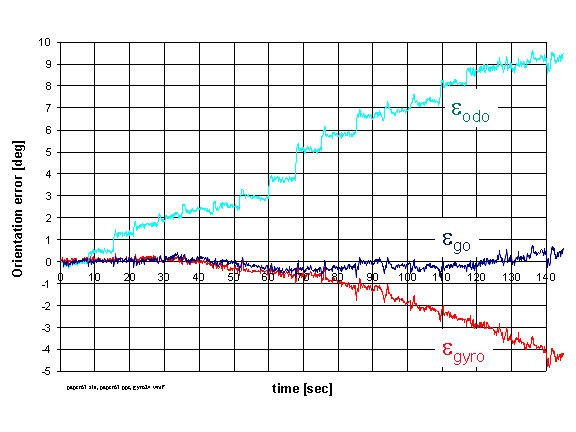
Figure 1: 2-minute run of a TRC LabMate robot on smooth concrete
floor with 15 artificially introduced 9-mm high bumps introduced under one wheel. Shown here are orientation
errors resulting from measurements based on odometry (E_odo), the gyro
(E_gyro), and the Gyrodometry method (E_go). The robot's speed was 10 cm/s.
Acknowledgment: This research was funded by Department of Energy Grant
DE-FG02-86NE37969.
For more detailed information on Gyrodometry see Borenstein
J. and Feng, L., 1996, "Gyrodometry: A New Method for Combining Data
from Gyros and Odometry in Mobile Robots." Proceedings of the 1996
IEEE International Conference on Robotics and Automation, Minneapolis,
Minnessota, Apr. 22-28, 1996, pp. 423-428.
This page last updated by Johann Borenstein on 7/5/96
johannb@umich.edu