Proceedings of the IEEE International Conference on Robotics and
Automation,
Albuquerque, NM, Apr. 21-27, 1997, pp. 1283-1288
The GuideCane — A Computerized Travel Aid
for the Active Guidance of Blind Pedestrians
by
Johann Borenstein and Iwan Ulrich
The University of Michigan
Advanced Technologies Lab, 1101 Beal Avenue
Ann Arbor, MI 48109-2110
Department of Mechanical Engineering and Applied Mechanics
Ph.: 763-1560, Fax: 944-1113, E-mail: johannb@umich.edu
Abstract
This paper introduces the GuideCane, a novel device designed to help blind or visually impaired travelers to navigate safely and quickly among obstacles and other hazards faced by blind pedestrians. The GuideCane, currently under development at the University of Michigan’s Mobile Robotics Lab, comprises of a long handle and a "sensor head" unit that is attached at the distal end of the handle. The sensor head is mounted on a steerable but unpowered 2- wheeled steering axle. During operation, the user pushes the lightweight GuideCane ahead of him/herself. Ultrasonic sensors mounted on the sensor head detect obstacles and steer the device around it. The user feels the steering command as a very noticeable physical force through the handle and is able to follow the GuideCane’s path easily and without any conscious effort.
I. Review of Existing Devices
The most successful and widely used travel aid for the blind is the white cane. It is used to detect obstacles on the ground, uneven surfaces, holes, steps, and puddles. The white cane is very inexpensive, and is so lightweight and small that it can be folded and tucked away in a pocket. More high-tech devices, discussed next, have been on the market for many years but appear to lack utility, and, consequently, are not widely used.
1.1 Conventional Electronic Travel Aids
In the past three decades several electronic travel aids (ETAs) were introduced that aimed at improving their blind users' mobility in terms of safety and speed.
The C-5 Laser Cane – was introduced in 1973 by Benjamin et al. [1973]. It is based on optical triangulation with three laser diodes and three photo-diodes as receivers. The Laser Cane can detect obstacles at head-height, drop-offs in front of the user, and obstacles up to a range of 1.5 m or 3.5 m ahead of the user.
The Mowat sensor -- is a commercially available [WORMALD] hand-held ultrasonic-based device that informs the user of the distance to detected objects by means of tactile vibrations. The frequency of the vibration is inversely proportional to the distance between the sensor and the object.
The Nottingham Obstacle Detector (NOD) – is a hand-held sonar device that provides an auditory feedback that indicates eight discrete levels of distance by different musical tones. The NOD has been commercially available since 1980 [Bissit and Heyes, 1980].
The Pathsounder – is one of the earliest ultrasonic travel aids. Two ultrasonic transducers are mounted on a board that the user wears around the neck, at chest height. This unit provides only three discrete levels of feedback (series of clicks), coarsely indicating distances to an object.
The Binaural Sonic Aid (Sonicguide) -- comes in the form of a pair of spectacle frames, with one ultrasonic wide-beam transmitter mounted between the spectacle lenses and one receiver on each side of the transmitter [Kay, 1974]. Signals from the receivers are frequency shifted and presented separately to the left and right ear. The resulting interaural amplitude difference allows the user to determine the direction of an incident echo and thus of an obstacle. The distance to an object is encoded in the frequency of the demodulated low-frequency tone.
Three fundamental shortcomings can be identified in all ETAs discussed in the foregoing sections:
1.2 Mobile Robots as Guides for the Blind
In general terms, one could argue that any mobile robot with obstacle avoidance (and there are tens or even hundreds of different mobile robots with such capabilities) can be used as a guide for the blind. However, mobile robots are inherently unsuited to the task of guiding a pedestrian. The foremost limitation of mobile robots is that they are large, heavy, and incapable of climbing up or down stairs or boardwalks. One might then argue that the blind pedestrian could use ramps and elevators, which are provided in many locations for the use of disabled persons with wheelchairs. However, this approach would actually burden the blind (but mobility-wise perfectly able-bodied traveler) with the additional, severe handicap of limited mobility.
1.3 The NavBelt
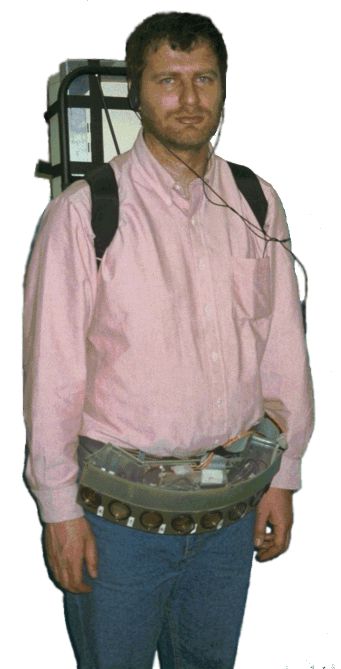
During the past six years we have conducted active research in applying mobile robot obstacle avoidance technologies to assistive devices for the handicapped. In 1989 we developed the concept of the NavBelt. The NavBelt is a portable device equipped with ultrasonic sensors and a computer. A prototype of this system was built and tested in our lab as part of a Ph.D. thesis (see Figure 1).
The NavBelt provided two modes of operation:
1. In the image mode the NavBelt produced a 120o-wide view of the obstacles ahead of the user (similar to a radar screen image). This image was then translated into a series of directional (stereophonic) audio cues through which the user could determine which directions were blocked by obstacles and which directions were free for travel. The problem with this method lay in the fact that a considerable conscious effort was required to comprehend the audio cues. Because of the resulting slow response time our test subjects could not travel faster than roughly 0.3 m/sec (1 foot/sec). And even this marginal level of performance required tens of hours of training time.
2. Another mode of operation is called guidance mode. In this mode it was assumed that the system knew the traveler's momentary position and the traveler's desired target location. Under these conditions, the NavBelt needed only generate a single (thus, low-bandwidth) signal that indicated the recommended direction of travel. It was much easier to follow this signal, and walking speeds of 0.6 - 0.9 m/sec (2 - 3 feet/sec) were achieved. The great problem was that in reality the system would not know the user's momentary position, as required by the guidance mode.
In this section we describe in some detail the components of the GuideCane system, and how these components are used to provide the desired functional capabilities.
2.1 System Description
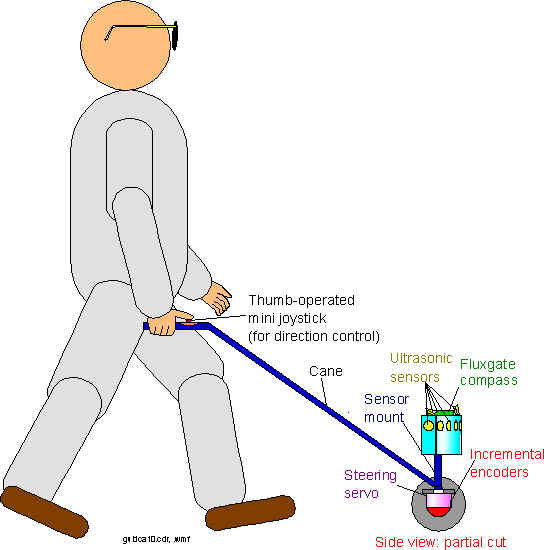
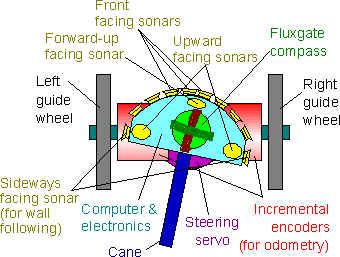
Figure 1 shows a blind user walking with the GuideCane. Much like the widely used white cane, the user holds the GuideCane in front of him/her while walking. The GuideCane is quite a bit heavier than the white cane, but it rolls on wheels that support the GuideCane's weight during regular operation. At the distal end of the GuideCane is a pair of guide wheels (see Figs. 1 and 2). A steering servo motor, operating under the control of the GuideCane's built-in computer, can steer the guide wheels left and right, relative to the cane. An array of ultrasonic sensors is mounted in a semi-circular fashion above the guide wheels (see Figs. 1 and 2). Additional sonars are facing upward and sideways. A fluxgate compass (i.e., an electronically operated and read compass) is also mounted above the guide wheels. Attached to each guide wheel is an incremental encoder, and the "onboard" computer uses the data from these encoders and from the fluxgate compass to compute the relative motion of the traveler, as well as the momentary travel speed. A miniature joystick that can be operated with the thumb (actually, a miniature pointing device like the one used in many notebook-sized computers) allows the user to specify a desired direction of motion (see Fig. 1).
2.2 Functional Description
During operation, the user holds the GuideCane in one hand, so that the guide wheels contact the ground right in front of the user (possibly offset slightly to the side of the hand that holds the cane). The user prescribes a desired direction of motion with the miniature joystick. This direction command is understood to be relative to the current absolute direction read off the fluxgate compass. For example, if the compass is facing straight north and the user indicates the direction to be "forward" (by pushing the joystick forward), then the system would lock into "straight north" as the desired direction of travel and steer the guide wheels so that the compass is always facing north. As another example, let us consider the case where the user indicated "right" as the desired direction of travel. Then the computer would add 90o to the current direction of travel (say, north) and steer the guide wheels to the right until the compass was facing east.
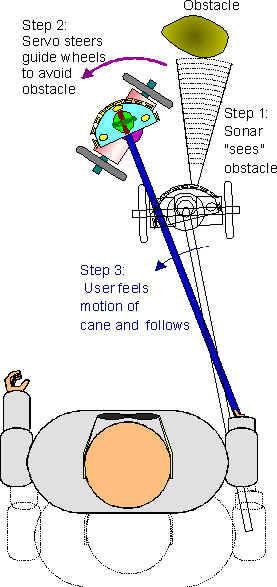
While traveling, the ultrasonic sensors detect any obstacle in a 120o wide sector ahead of the user. Advanced obstacle avoidance techniques, developed originally for mobile robots, are implemented on the onboard computer. These techniques enable the system to instantaneously determine an optimal direction of travel even among densely cluttered obstacles. For example, if the system was "locked" into a desired travel direction of north, but an obstacle blocked the way (see step 1 in Fig. 3), then the obstacle avoidance algorithm would prescribe an alternative direction that would clear the obstacle but would be facing north as close as possible (see step 2 in Fig. 3). Once the guide wheels begin to move sideways to avoid the obstacle, the user feels the resulting horizontal rotation of the cane (see step 3 in Fig. 3). In a fully intuitive (i.e., there is virtually no training time required) response, the traveler changes his orientation to align himself with the cane at the "nominal" angle. In practice, the user's walking trajectory follows the trajectory of the guide wheels similar to the way a trailer follows a truck. Once the obstacle is cleared the guide wheels steer again in the original desired direction of travel. The new line of travel will be offset from the original line of travel. Depending on the circumstances, the traveler may wish to continue walking along this new line of travel, or, the system can be programmed to return to the original line of travel. This latter option is made possible by the full odometry capability provided by the guide wheels and their attached encoders.
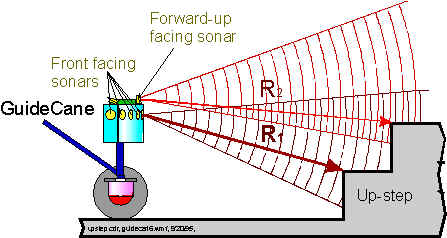

One particularly difficult problem for blind pedestrians is that of stairs. The GuideCane offers separate solutions for down-steps and up-steps. Down-steps are detected in a failsafe manner: when a down-step is encountered, the wheels of the GuideCane drop off the edge C without a doubt a signal that the user can't miss. Up-steps are potentially more difficult to detect. The height of the main array of front-facing sensors is such that the first step of the up-steps is detected just like an obstacle. However, higher up on the GuideCane and mounted at a different angle is one additional sensor, called the "forward-up" facing sensor. This sensor "looks" above the bottom step and detects the presence of the second step at distance R2. The difference between R2 and R1 is computed and, if it meets a pre-programmed criterion for stairs, then the
GuideCane identifies the object as stairs. If R2 and R1 are almost equal, then the object is treated as a wall. If R2 is much larger than R1, then the GuideCane interprets the object as an obstacle that needs to be avoided.
2.3 Additional Functions
The utility of the GuideCane can be further enhanced by a variety of other advanced features, although these features are not necessarily unique.
Global Navigation
The GuideCane can be equipped with a Global Positioning System (GPS). Outdoors, commercially available GPSs (which cost less than $1,000) can provide global positioning information to within 20 meters accuracy. This makes it possible for the blind individual to prescribe a desired target location (for example, the supermarket or the post office) to the system and to have the GuideCane automatically guide the user to that location. Alternatively, the system could learn a desired path by recording path segments during an initial "lead-through" run with a sighted person. Indoors, where GPS is not effective, the same path programming or lead-through techniques can be used to have the GuideCane automatically guide the user to a desired location, using dead-reckoning based on encoder and compass readings. This latter method of dead-reckoning is not suitable for long distances because of the unbounded accumulation of odometry errors, but it is suitable for shorter indoor paths.
Wall Following
Many indoor travel tasks take place in long corridors. A technique known as "wall following" can be implemented easily, using only the two sideways facing sonars for navigation.
Speech input/output
A large variety of functions can be implemented with the help of speech output and/or input modules attached to the onboard computer. One useful function could be the instant presentation of exact location and orientation data.
III. Conclusions and Discussion
The GuideCane is unique in that it physically directs the user around obstacles and toward a user-prescribed target. Indeed, the uniqueness is thus twofold:
3.1 Guidance Signals versus Obstacle Information
Existing ETA's are designed to notify the user of obstacles (usually requiring the user to perform some sort of scanning action). Then, the user must evaluate all of the obstacle information, which comprises of the size and proximity of each obstacle and decide on a suitable travel direction. In sighted people (or in animals) such relatively high bandwidth information is processed almost reflexively, usually without the need for conscious decisions. Nature had millions of years to perfect this skill. However, the evaluation of obstacle information presented acoustically is a new skill that must be acquired over hundreds of hours of learning. Even then, exercising such a skill will take a great deal of conscious effort, and thus processing time. The required effort further increases with the number of obstacles found.
The GuideCane is fundamentally different from other devices in that it "views" the environment and computes the momentary optimal direction of travel. The resulting guidance signal is a single piece of information C a direction C which means that the bandwidth of the information is much smaller. The consequence is that it is far easier, safer, and faster to follow the low-bandwidth guidance signal of the GuideCane than to follow the high-bandwidth information of other existing systems.
3.2 Information Transfer
In our own prior research with the NavBelt (see Section 2.6), we tested different methods of using binaural (stereophonic) signals to guide the user around obstacles. We found that it is generally extremely difficult to recognize and react to such signals at walking speed. Even after nearly 100 hours of training (and many more hours of optimizing the system itself), the Ph.D. student who conducted this research could not walk safely at walking speed. By contrast, when we preliminarily tested the guidance capability of the GuideCane (by having a sighted person steer the guide wheels by remote control), we found that any subject could immediately follow the GuideCane at walking speed and among densely cluttered obstacles.
This success can be credited to another unique feature of the GuideCane: Information transfer through direct physical force. Indeed, there are two different forces that the GuideCane exerts on the user. Both forces are completely intuitive, which means that any user can use the system immediately and without learning how to interpret artificially defined acoustic of tactile signals (as is the case in existing ETAs). Furthermore, yielding to external forces is a reflexive process that does not require a conscious effort. We will briefly describe the nature of these two forces.
3.2.1 Moment due to horizontal rotation of the cane
Even though the GuideCane is basically unpowered (except for the small amount of power needed for steering), the GuideCane can apply a substantial amount of physical force on the user if the user fails to respond to a change of direction prescribed by the device. This force is the result of the sideways motion of the guide wheels when avoiding an obstacle. The resulting rotation of the cane forces a clearly noticeable rotation of the hand that holds the proxal end of the cane.
3.2.2 Change in resistance to pushing the cane
A second force, immediately noticeable after the guide wheels change their orientation (but even before the user feels the rotation of the cane), is the increased reaction force that is opposed to pushing the cane forward. We will not analyze this second force in detail but in essence it can be understood as follows: When walking while the cane and the guide wheels are perfectly aligned, the user must only overcome the reactive force resulting from the friction in the bearings and the roll resistance of the wheels. Let's say this force was equivalent to one pound. Now, suppose the guide wheels steered 60o in either direction. Then the traveler would have to push the cane with a force of 1/cos60o = 2 pounds in order to overcome the 1 pound reactive force of the guide wheels. This change in reactive force is immediately felt by the user and prepares her immediately for an upcoming steering maneuver.
References
1. Benjamin, J. M., Ali, N. A., and Schepis, A. F., 1973, "A Laser Cane for the Blind." Proceedings of the San Diego Biomedical Symposium, Vol. 12, pp. 53-57.
2. Bissitt, D. and Heyes, A. D., 1980, "An Application of Biofeedback in the Rehabilitation of the Blind." Applied Ergonomics, Vol. 11, No. 1, pp. 31-33.
3. Blasch, B. B., Long, R. G., and Griffin-Shirley, N., 1989, "National Evaluation of Electronic Travel Aids for Blind and Visually Impaired Individuals: Implications for Design." RESNA 12th Annual Conference, New Orleans, Louisiana, pp. 133-134.
4. Borenstein, J., Koren, Y., and Levine, S. P., 1991, "Obstacle-Avoiding Navigation System," U.S. patent #5006988, issued April 9, 1991., 33 claims, (Rights Assigned to the University of Michigan).
5. Borenstein, J. and Koren Y., 1993, "Error Eliminating Rapid Ultrasonic Firing for Mobile Robot Obstacle Avoidance." U.S. patent #5,239,515 issued August 24, (Rights Assigned to the University of Michigan).
6. Brabyn, J. A., 1982, "New Developments in Mobility and Orientation Aids for the Blind." IEEE Transactions on Biomedical Engineering, Vol. BME-29, No. 4, pp. 285-289.
7. Clark-Carter, D. D., Heyes, A. D., and Howarth, C. I., 1986, "The Effect of Non-visual Preview Upon the Walking Speed of Visually Impaired People." Ergonomics, Vol. 29, No. 12, pp. 1575-1581.
8. Freeston, I. L., Callaghan, V. L., and Russell, N. D., 1984, "Portable Navigation Aid for the Blind." Frontiers of Engineering and Computing in Health Care - 1984 Proceedings, Sixth Annual Conference - IEEE Engineering in Medicine and Biology Society. Los Angeles, California, Sep. 15-17, pp. 247-249.
9. Gilden, D., 1988, "Annual Report of Progress." Report of the Rehabilitation Engineering Center of the Smith-Kettlewell Eye Research Institute, San Francisco, California, pp. 23-24.
10. Kay, L., 1974, "A Sonar Aid to Enhance Spatial Perception of the Blind: Engineering Design and evaluation." Radio and Electronic Engineer, Vol. 44, No. 11, pp. 605-627.
11. Kelly, G. W. and Ackerman, T., 1982, "Sona, the Sonic Orientation and Navigational Aid for the Visually Impaired." 5th Annual Conference on Rehabilitation Engineering, Houston, Texas, p.72.
12. Kumpf, M., 1987, "A New Electronic Mobility Aid For The Blind - a Field evaluation." International Journal of Rehabilitation Research, 1987; Supplement No. 5 to vol. 10, No. 44, pp. 298-301.
13. Lebedev, V. V. and Sheiman, V. L., 1980, "Assessment of the Possibilities of Building an Echo Locator for the Blind." Telecommunications and Radio Engineering, Vol. 34-35, No. 3, pp. 97-100.
14. Milner, R. E. and Gilden, D., 1988, "Navigation Device for the Blind." ICAART 88, Montreal, Canada, pp. 214-215.
15. Shao, S., 1985, "Mobility Aids for the Blind." Electronic Devices for Rehabilitation, John Wiley & Sons, New York, New York, pp. 79-100.
COMMERCIAL PRODUCTS
Wormald International Sensory Aids, 6140 Horseshoe Bar Rd., Loomis, CA 95650.