- Processes unorganized point cloud
- Real-time processing
- Provides compression
- Incremental update
- Ideal for robotics applications including
- Visualization for effective human-robot interaction
- SLAM
- Grasping
- Traversability assessment
What is good meshification algorithm?
Existing work
Marching Cubes
- Requires scalar field
- Generates pair of surfaces
Greedy Projection (Marton et al. 2009)
- No compression
Poisson (Kazhdan et al. 2006)
- Closed water tight surfaces
Voxel planes
Rapid meshification and compression of point clouds
Occupancy grids
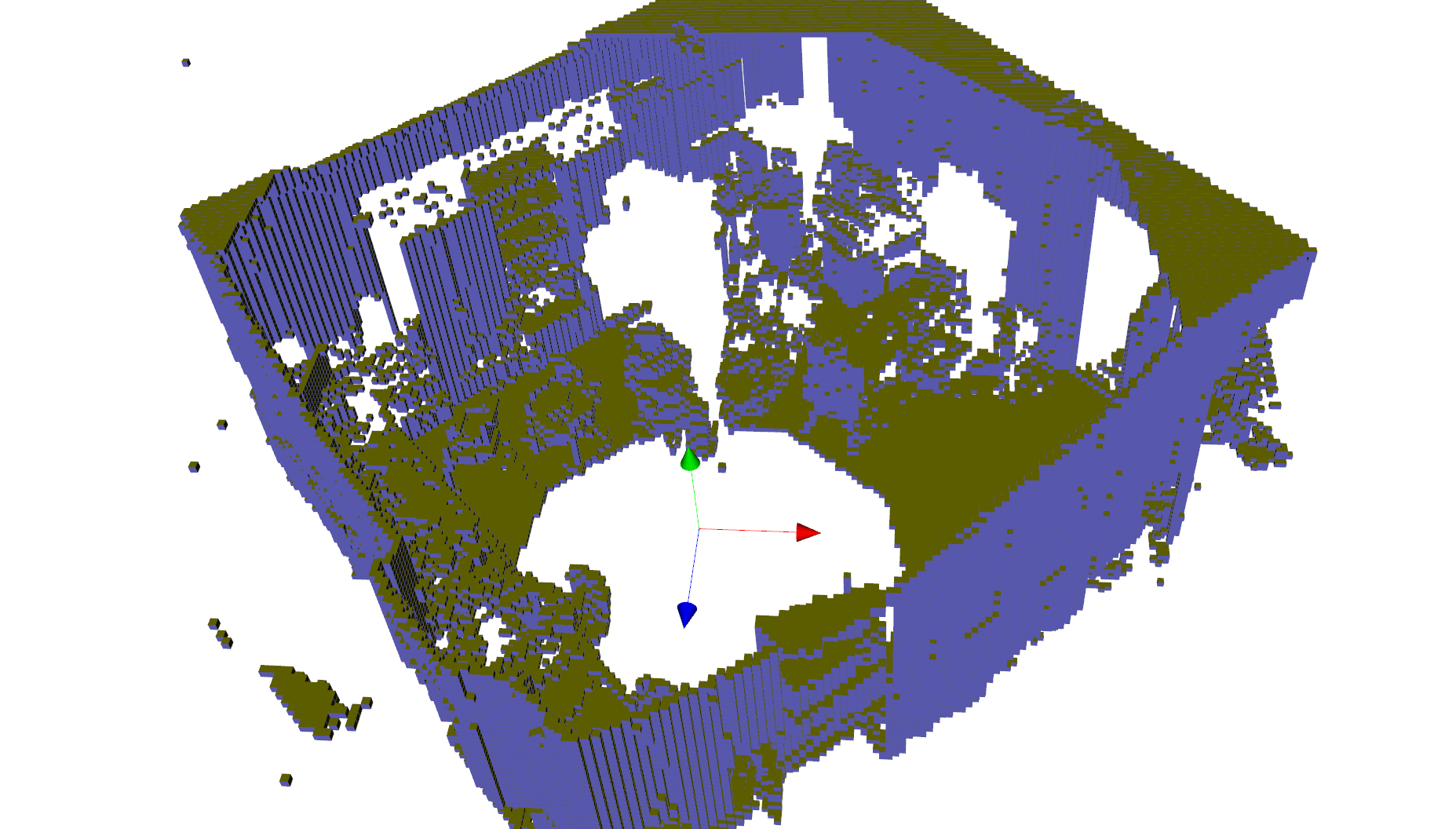
Occupancy grids
- Processes unorganized point cloud
- Real-time processing
- Provides compression
- Incremental update
- Ideal for robotics applications including
- Visualization for effective human-robot interaction
- SLAM
- ?? Grasping
- ?? Traversability assessment
Voxel planes algorithm (simplified)

Result
Sliding window approach




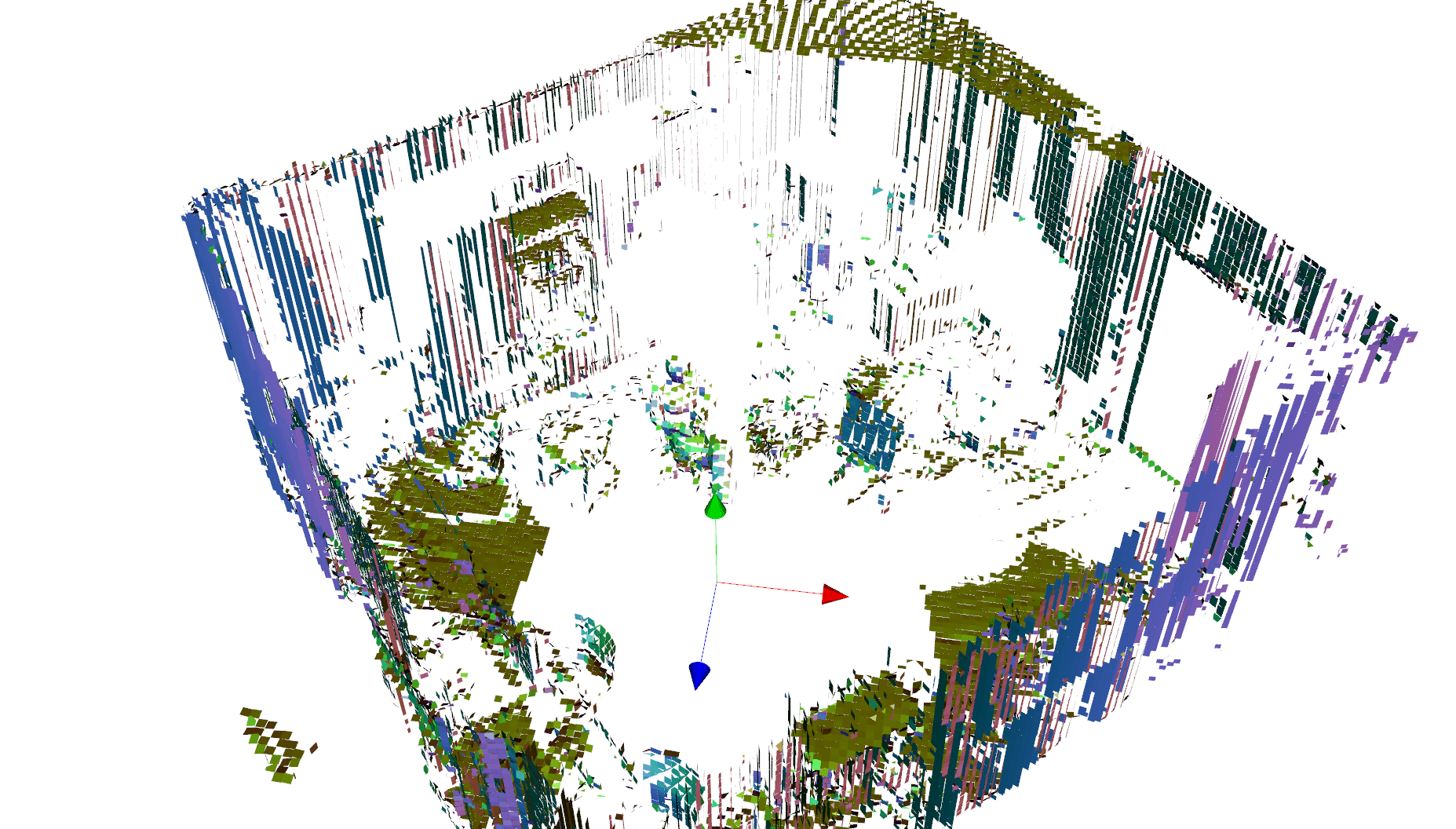
Without sliding window
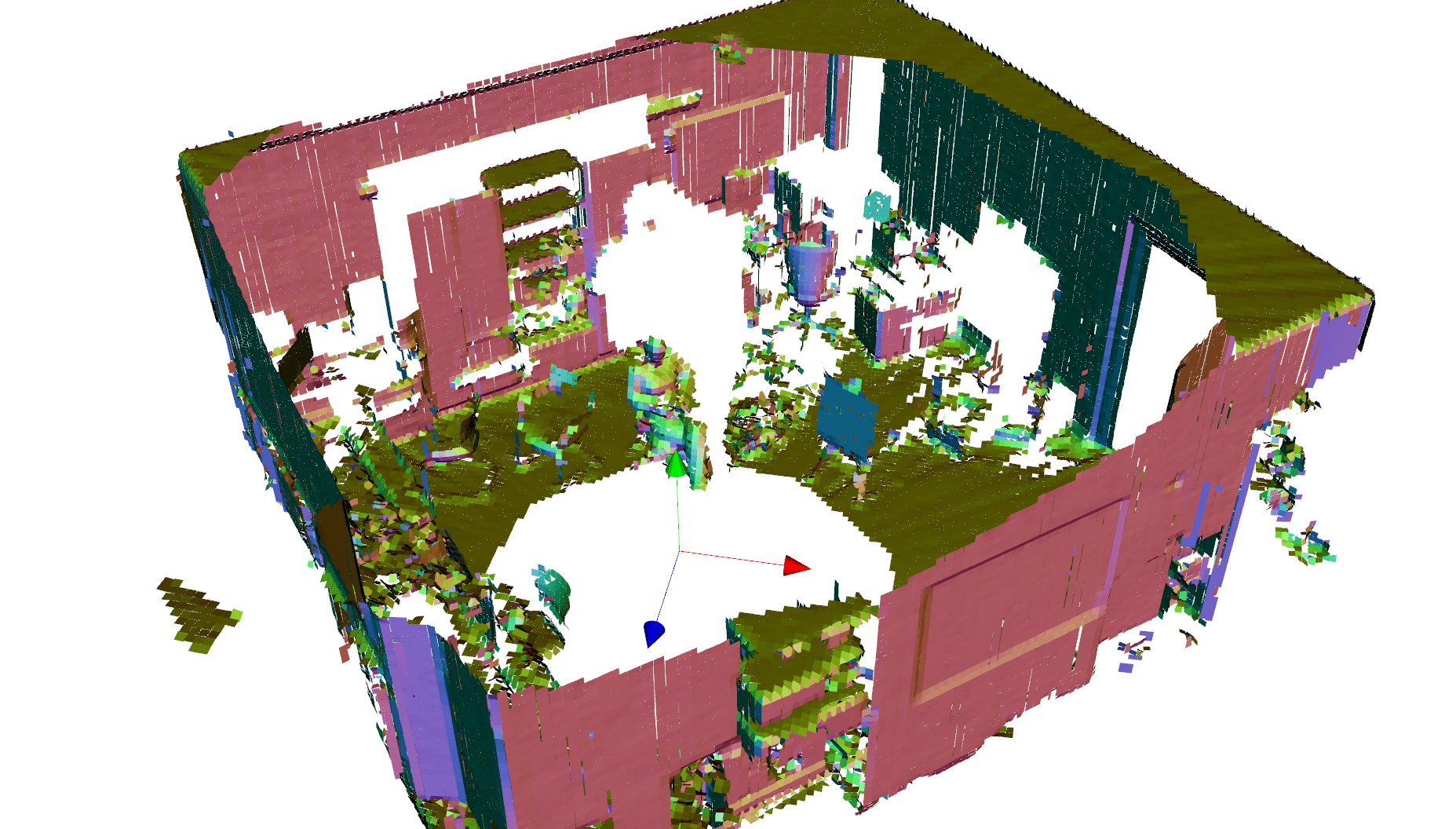
With sliding window
Voxel planes with sliding windows
Gaussians incremental update
\[
\renewcommand{\v}[1]{\mathbf{#1}} % format for vectors
\DeclareMathOperator{\cov}{cov}
\]
\[ p_i = \frac{N_i}{\sum_i N_i} \]
\begin{equation} \bar{X} = \sum_i p_i \bar{X_i} \label{eq:mog_mean} \end{equation} \begin{equation} \cov X = \sum_i p_i \left( \cov X_i + \bar{X_i} \bar{X_i}^\top - \bar{X} \bar{X}^\top \right) \label{eq:mog_cov} \end{equation}
Blockwise data structure

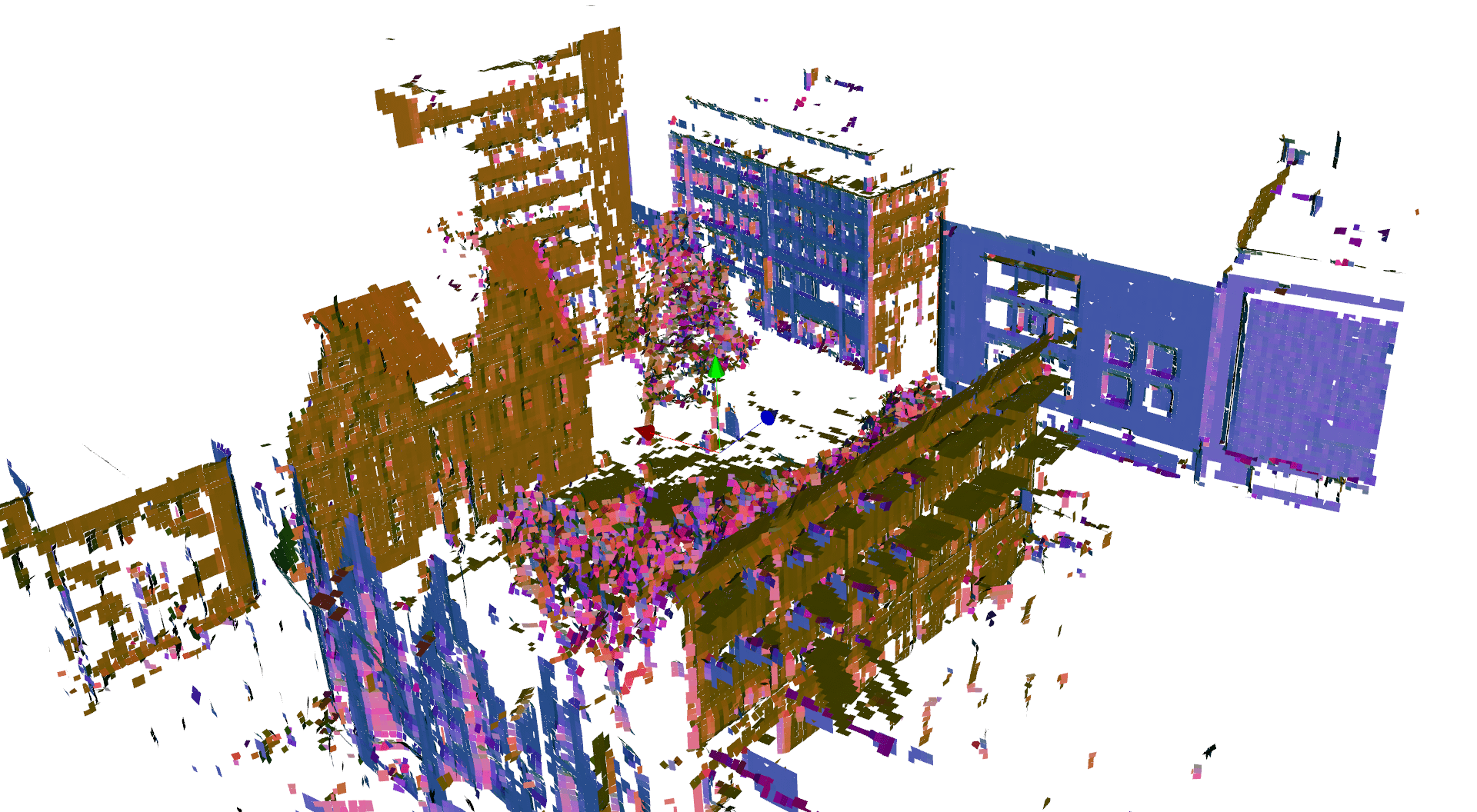
Experiments
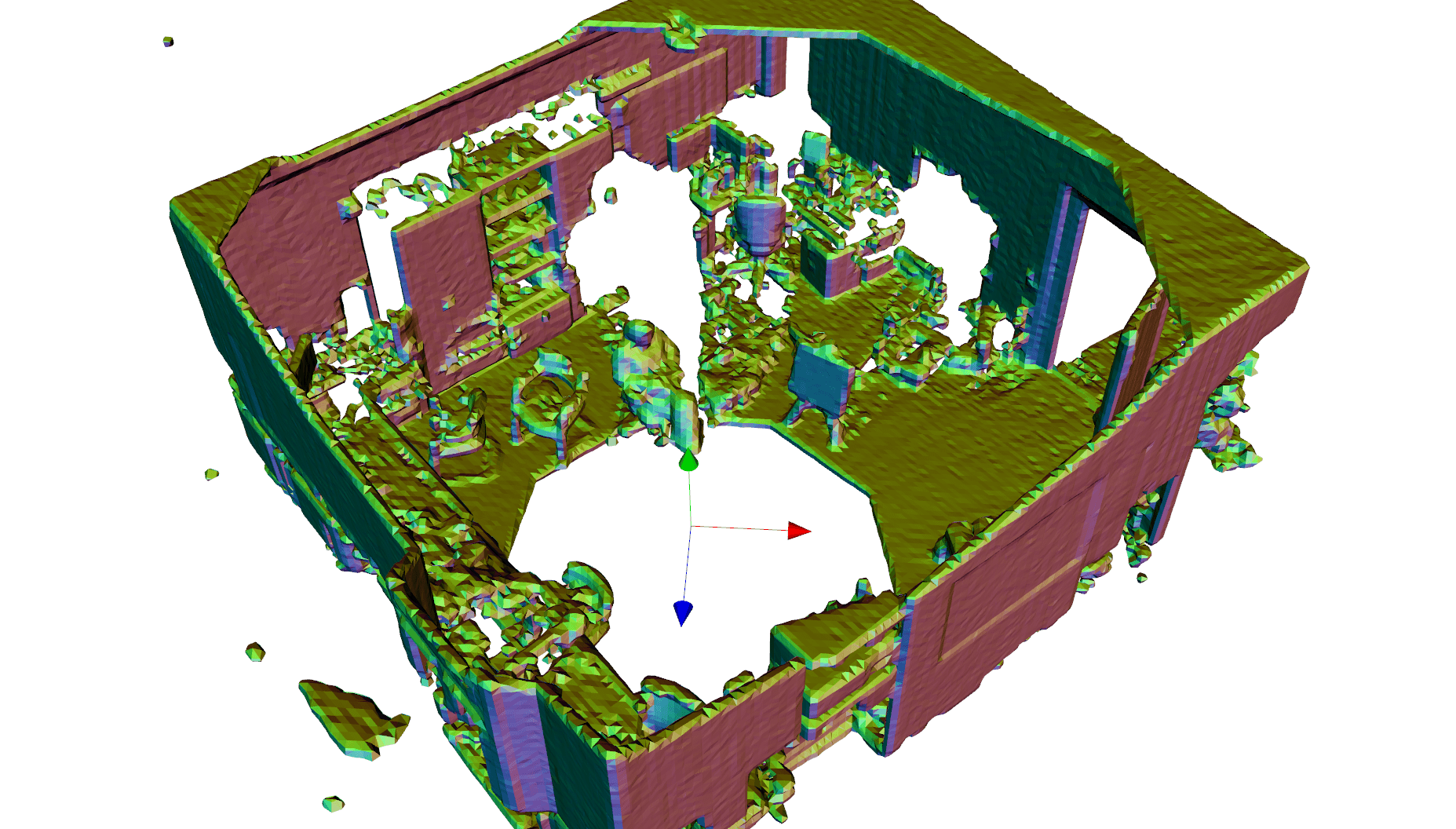
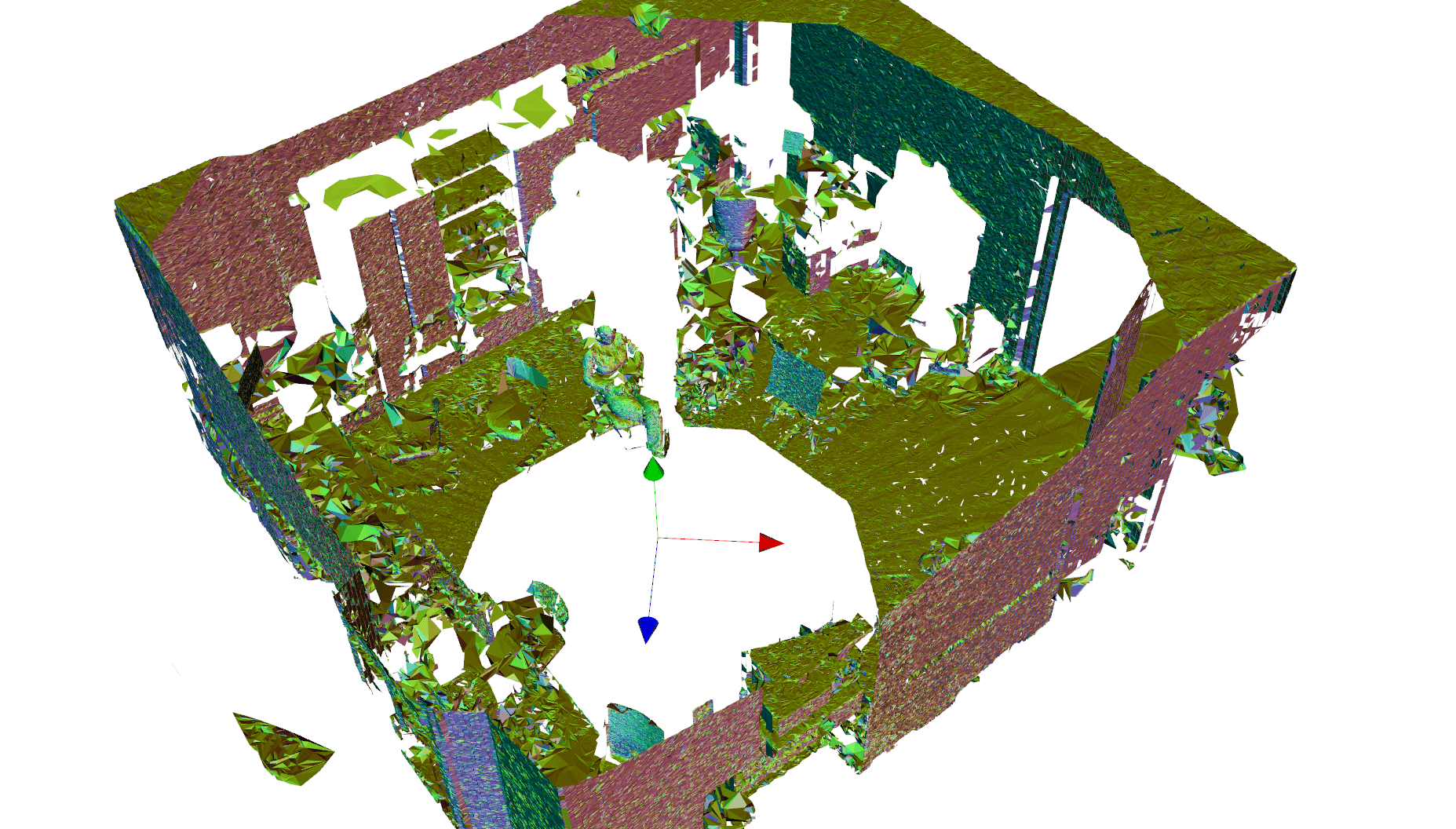
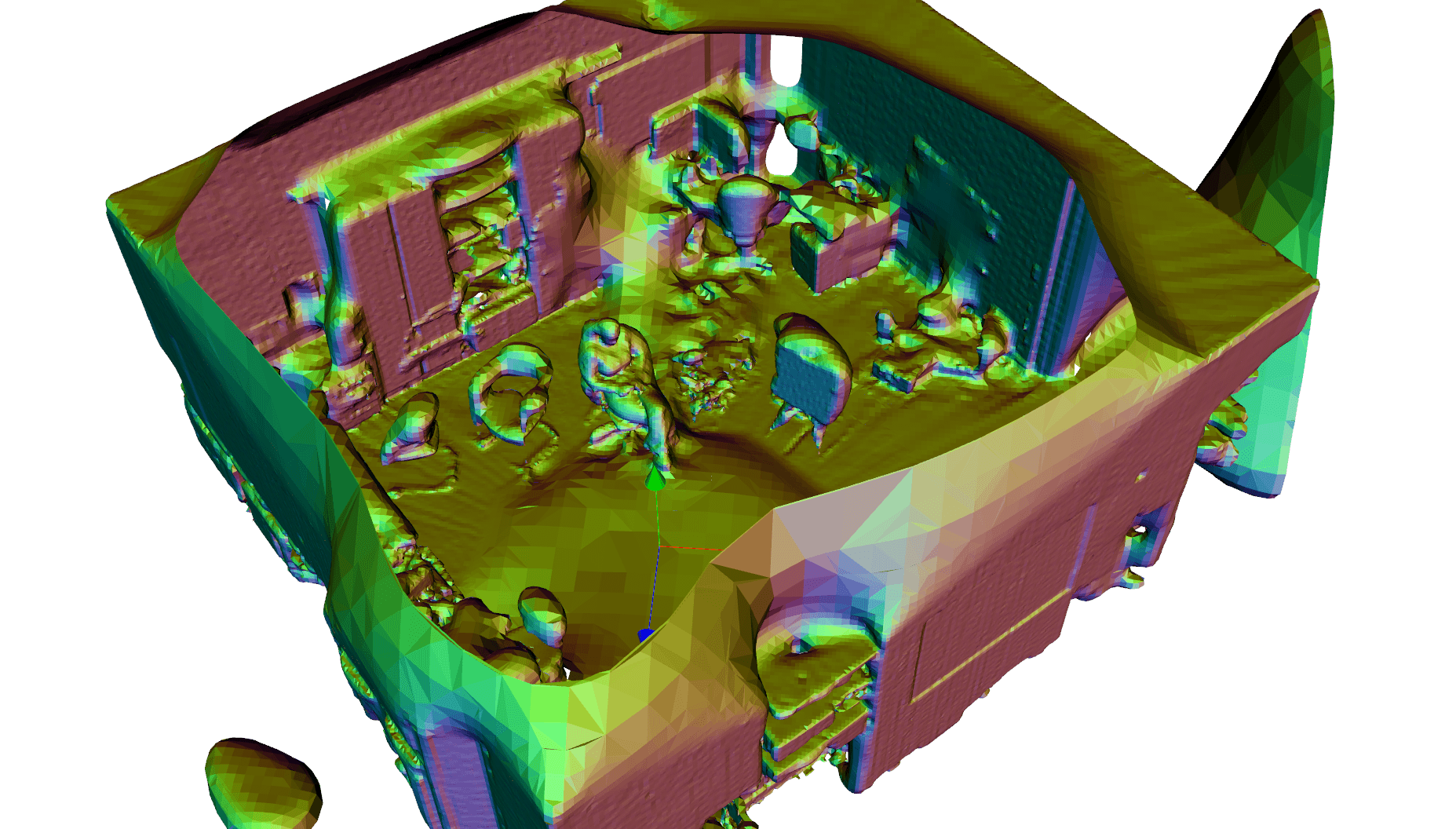
Comparison with Greedy Projection and Marching cubes
Qualitative comparison
Runtime comparison

Compression efficiency

Thermogauss dataset (Borrmann et al. 2009)
Thermogauss results


Conclusion
- Meshification for robotics
- Processes unorganized point cloud
- Supports incremental update
- Faster than marching cubes
- Provides better compression than marching cubes and greedy projection
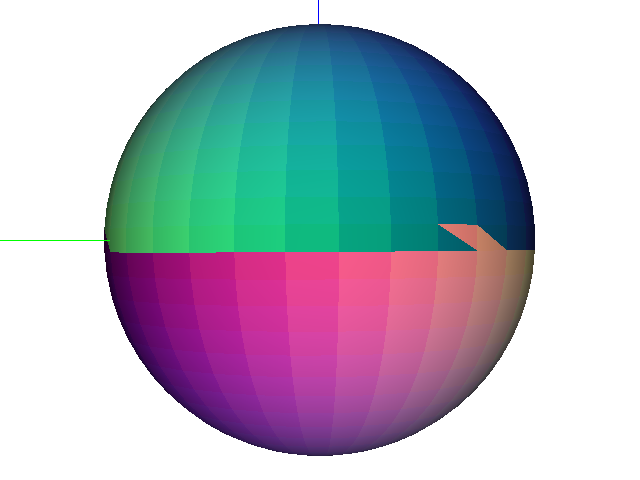
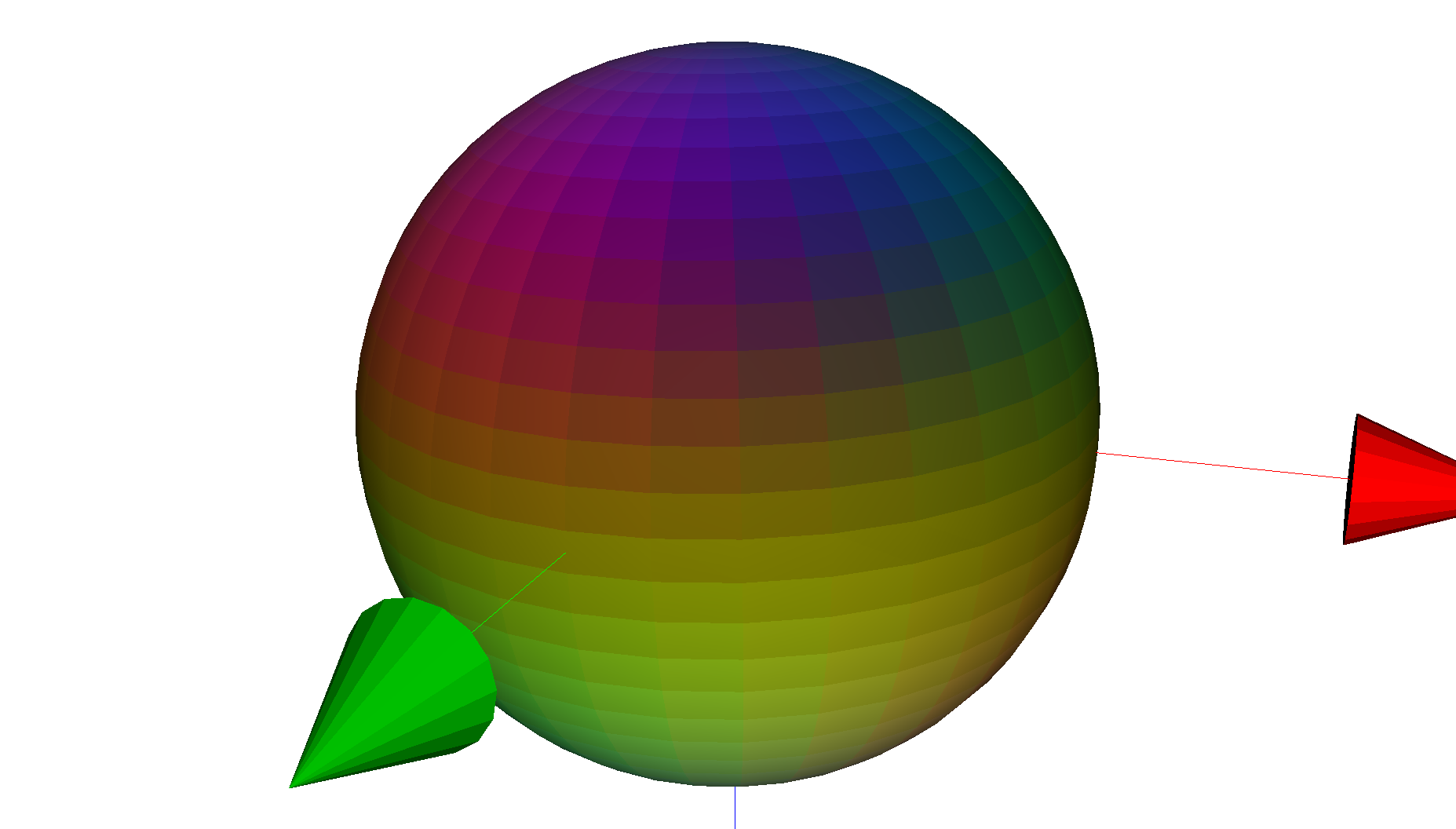
Coloring surfaces by normals
-
Requirements
- Same colors for opposing normals
- Continous colorspace
-
Flipping normals
- Creates discontinuity around the flipping plane
- Stretch the hemisphere to enclose the sphere
\begin{align*}
[R, G, B] &= \frac{1}{2} \left[ \sin2\theta\cos\phi + 1, \sin2\theta\sin\phi + 1, \cos2\theta + 1 \right]
\end{align*}
Questions?
Thank You for listening !
Acknowledgements
This material is based upon work partially supported by the Federal Highway Administration under Cooperative Agreement No. DTFH61-07-H-00023. Any opinions, findings, conclusions or recommendations are those of the authors and do not necessarily reflect the views of the FHWA.