
Cell Culture Instrumentation
Robert G. Dennis, Ph.D.
|
|
Cell Culture Instrumentation Robert G. Dennis, Ph.D. |
|
Bob's Home Page Current Research Muscle Mechanics Lab (U of M) Biomechatronics Group @ MIT
Objective: Apply controlled electrical, chemical, and mechanical stimulation to engineered skeletal muscle in vitro to optimize conditions for function.
Background:
The myooid
engineered skeletal muscle construct was developed to provide a stable
baseline for functional skeletal muscle maintained for long periods of
time in vitro (up to 5 months). The muscle contractility and
excitability are poor when compared with control muscle, but this is to
be expected, because currently myooids are maintained at fixed length,
with no vascular perfusion, no circulating growth factors, and no innervation
or nerve-derived trophic factors. As a result, the muscle fibers
within myooids remain at a developmentally arrested state and do not achieve
adult phenotype.
Experimental plan:
I have designed and
built a series of bioreactors that I call Development Emulators,
because they are designed to allow the conditions present during growth
and development of a muscle to be emulated. The last version of the
developmental emulator is shown in some detail below. A more current
version is under development and is expected to be on line in early 2001.
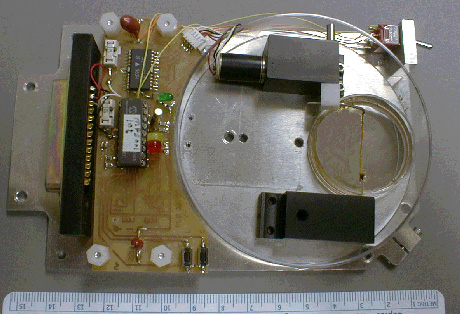
| A single Development Emulator unit. The units are modular, and are maintained in organized stacks (shown below) in a cell culture incubator. The central feature of the developmental emulator units is the local control of the electromechanical interventions by an embedded microprocessor (the largest integrated circuit visible at the right). Visible to the extreme right is a myooid (skeletal muscle construct), attached above by a linear servo motor (stepper motor, planetary gear head, and rack-and-pinion), and attached below to a force transducer. On the PC board (not shown) is the stimulation electronics for electrically stimulating the muscle tissue. All of the components of the Development Emulator are designed specifically for use with this system. |
 |
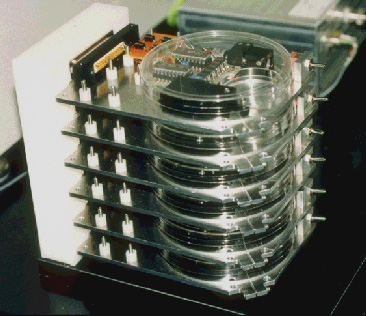
| A stack of Development Emulators is shown to the right. The units are modular, and can be individually addressed by an external computer running LabVIEW software. Each unit plugs into a Data and Power bus via a 25-pin D-subminiature connector. Each unit has closed-loop control of the servo motor position and the electrical stimulation. By controlling the force generated during contraction, an Emulator unit can elicit active or passive length changes in the muscle, and can apply rapid length changes to simulate limb movement or slow monotonic length changes to simulate long bone growth. The excitability and contractility of each tissue specimen is monitored, and the interventions are modified to accommodate the development of each tissue specimen. We have patented this type of feedback control, and have been allowed very broad claims. |
 |
Collaborations:
I am currently collaborating
with Herman Vandenburgh, Robert Valentini, and Paul Kosnik at Cell
Based Delivery, Inc. to help them develop a massively scalable bioreactor
with the same functionality as the units shown here. I am also collaborating
with Hugh Herr
at MIT to develop genetic algorithms to search the solution space for optimal
combinations of interventions, to maximally enhance the excitability and
contractility of the engineered skeletal muscle constructs. Both
of these collaborations are DARPA funded projects for the development of
practical tissue based actuator systems.
Bob's Home Page Current Research Muscle Mechanics Lab (U of M) Biomechatronics Group @ MIT