Shorya Awtar's Doctoral Research
Precision Engineering Research Group (PERG), MIT
The Precision Engineering Research Group at
MIT is headed by Prof. Alexander
Slocum and conducts research in a variety of areas including nanotechnology,
MEMS, machine-tool design, bearing systems, to
name a few. I was associated with the group from 08/2000 to 12/2003,
and worked on various research projects during this period. This page provides a detailed description of these projects.
The reader is welcome to browse through this page and offer any thoughts / suggestions /criticism on the work by sending an email. Most work on this page is either patented or published. Please seek appropriate permissions from the inventor(s) or MIT's Technology Licensing Office (TLO) prior to using any technology described here for commercial purposes.
Analysis and Synthesis of Precision Flexure Systems
Planer multi Degree-of-Freedom Flexure Mechanisms
This work presents a new class of parallel-kinematics flexure mechanisms that have multiple degrees of freedom and substantially small error motions. These mechanisms are of importance to macro and micro scale precision positioning applications, including MEMS sensors and actuators, optical imaging, and semiconductor fabrication. A systematic approach for the analysis and synthesis of these flexure mechanisms is presented. Synthesis rules are explored based on fundamental design principles such as symmetry and reciprocity. An attempt is made to quantify the effects of these intuitive design rules. Constraint analysis, error motion analysis, and performance optimization are some of the areas that are explored for a specific group of flexures, and may be extended to other topologies as well.
Click here to access papers and patents resulting from this work.
In-plane Capacitance Probe holding Mechanism
Here is a link to a mechanism that I came up with while designing my experimental set-up. I could not find a good mechanism to hold in-plane capacitance probes, that are used for highly accurate measurement of small displacements. Please send me a note if you know of any similar or other in-plane probe holders.
Symmetric Diaphragm Flexure based couplings, linear bearing & motion stages
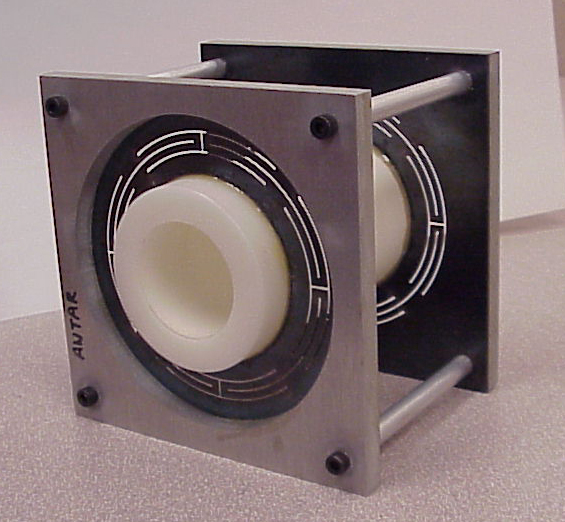
Most existing diaphragm flexures are prone to parasitic error motions, i.e., in addition to the desired out of plane motion, these designs also exhibit an undesirable twist. A symmetric diaphragm flexure that is free of such parasitic motions is presented. Based on this basic flexure design, some interesting torque couplings and linear bearings are developed. The following invention disclosure provides a detailed discussion, and pertinent prior art .
Symmetric Diaphragm Flexure: Technology Disclosure submitted to MIT Technology Licensing Office
Click here to access papers and patents resulting from this work.
Optical MEMS scanner for Optical Coherence Tomography
Two axis optical MEMS mirrors find use in many applications including raster scanning, image projection, optical networking, bio-medical imaging, etc. In all these applications micro-mirrors are employed to steer a beam of light. While successive single axis mirrors may be used to steer the beam along multiple axes, a single two-axis mirror provides a simpler, more compact and inexpensive alternative.
Departing from the prior art, we conceived a two-axis optical scanning mirror design based on a novel resonant structure that provides optimal raster scanning action. The two scanning axes are orthogonal and are designed to be highly decoupled. Furthermore, translational errors of the mirror are eliminated by using the principle of virtual pivot for cantilever beams. PZT electrodes are employed to excite the structure at the frequencies that correspond to its two desired natural vibration modes. A simple fabrication process flow allows for mass production of the device.
The following documents provide further details
This project won the Best Course Project Award for the term. Patent applications based on the above disclosures are currently being prepared for filing and a paper on this work is available on the publications page.
Machine Design, Mechatronics and Automation
Apart from designing flexure systems, I also worked on several projects in Machine Design and Mechatronics, outside my thesis work. I have made dedicated websites for the projects listed below that can be accessed by clicking on appropriate links.
Backend Automation in the Semiconductor Industry
Click here for an article that appeared in Future Fab International, Vol. 12, 2002
Magnebots - A new overhead transportation system for use in hospitals and homes

Precision Grinding Machine based on the Axtrusion System
Prof. Slocum and his former graduate student Roger Cortesi have developed an integrated actuator and bearing system called Axtrusion. I helped in the detailing and layout of a precision grinding machine that Prof. Slocum designed for Overbeck Inc. The machine incorporated two Axtrusion axes, making the overall design extremely simple and modular, and much more economical. This machine was displayed at the International Machine Tool Symposium, 2002 held in Chicago, and made it to the cover page of American Machinist, Dec 2002 issue. Please refer to the American Machinist article for complete details.
Design and Fabrication of Radio-Controlled Cars
This was a fun course project for MIT's Design and Manufacturing Course. Teams of students were required to design RC cars for mass production, and then fabricate half a dozen identical vehicles. The course culminated in an MIT famous 'Cah Race'. My team was placed second in this competition. Here is a report with some cool pictures.
My prime contribution to the project was design of a neat, yet extremely simple, suspension mechanism based on leaf springs made from spring steel. The mechanism provided excellent vertical as well as roll suspension, without using any fancy cost-adding linkages and dashpots. Click here for a one-page illustration.
Maintained by Shorya Awtar, 2007